










Serviços Personalizados
Artigo
 Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
Indicadores

Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkJournal of the Southern African Institute of Mining and Metallurgy
versão On-line ISSN 2411-9717
versão impressa ISSN 2225-6253
J. S. Afr. Inst. Min. Metall. vol.115 no.11 Johannesburg Nov. 2015
http://dx.doi.org/10.17159/2411-9717/2015/v115n11a12
PAPERS OF GENERAL INTEREST
Uncertainty determination in rock mass classification when using FRMR Software
F. Samimi NaminI; M. RinneII; M. RafieI
IMining Engineering Department, University of Zanjan, Zanjan, Iran
IIGeoengineering, Department of Civil and Environmental Engineering, Aalto University, Espoo, Finland
SYNOPSIS
Rock mass classification systems constitute an integral part of empirical underground excavation design. One system that is commonly used to classify rock mass is the Rock Mass Rating, or RMR, system. The RMR system has evolved over time to better reflect the perceived influence of various rock mass factors on excavation stability. While the introduced modifications have enhanced the applicability of this classification system, there are still areas that cause potential ambiguity. The RMR system cannot deal with input data ambiguities, uncertainties, and vagueness. To deal with the uncertainty, a Fuzzy Rock Mass Rating (FRMR) has been developed. This study aims to describe the main concept of the fuzzy approach, which is implemented in the FRMR to classify rock mass. The FRMR considers the uncertainty associated with the input data (uncertain variables) used in rock mass classification. The Gol-e-Gohar (GEG) area 3 iron ore deposits in the south of Iran were chosen as the case study for investigating the applicability of FRMR. The results of this study show that the FRMR software tool can easily be used for rock mass classification, even if uncertain input parameters have been used. FRMR consists of three parts, each of which is suitable for certain conditions.
Keywords: rock mass classification; RMR; FRMR; geotechnical uncertainty; fuzzy logic
Introduction
Nowadays, rock engineering classification systems, which constitute the backbone of the empirical design approach, are widely employed in both civil engineering and mining engineering. Rock mass classifications have recently been quite popular and are being used mostly for the preliminary design and planning purposes of projects. According to Bieniawski (1989), a rock mass classification scheme is intended to classify the rock masses, provide a basis for estimating deformation and strength properties, supply quantitative data for support estimation, and present a platform for communication between the exploration, design, and construction groups.
The requirements for building the type of system that can adequately solve rock engineering problems include the following:
► A supervised classification system must be adapted to fit the specific project at hand
► The reliability of the classes to handle the given rock engineering problem must be estimated
► The classes must be exhaustive and mutually exclusive (i.e. every object has to belong to a class and no object can belong to more than one class)
► The principles of the division into classes must be established based on suitable indicators
► The indicators should be related to the different tools used for the design
► The principles of the division into classes must be flexible so that additional indicators can be incorporated into the scheme
► The principles of the division into classes have to be updated to take into account the experiences gained during the construction phase
► The uncertainties or quality of the indicators must be established so that the probability of classification can be estimated
► The system should be practical and robust and provide an economic and safe design.
In practice, none of the existing classification systems fulfil the requirements mentioned above and, thus, do not constitute a true classification system capable of solving rock engineering problems. According to Williamson and Kuhn (1988), 'no classification system can be devised that deals with all the characteristic of all possible rock material or rock masses'. Riedmuller and Schubert (1999) further note that the 'complex properties of a rock mass cannot sufficiently be described by a single number'.
Rock masses are complex materials that exhibit different properties. Hence, they are divided into uniform structural regions. Quantitative rock mass classification systems are based on the experiences of engineers and designers and enable them to communicate with one another (Singh, 1999).
An RMR classification system, also known as a geomechanics classification system, was first proposed in 1973 and later modified based on new experiences (tunnel projects) and changing standards. Despite the changes made over the years, the system remains the same in principle (Bieniawski, 1989).
The RMR system has been used in many tunnel projects as one of the main indicators for defining the support or excavation classes (Stille and Palmstrom, 2003).
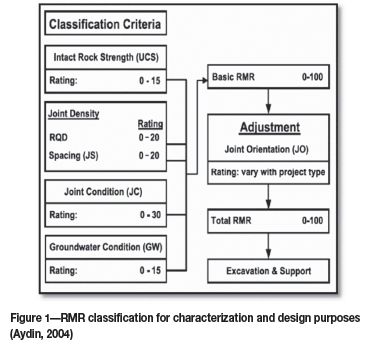
Bieniawski developed a Rock Mass Rating (RMR) system based on six parameters: (1) the uniaxial compressive strength of intact rock (UCS), or test point load strength index; (2) the Rock Quality Designation (RQD); (3) the joint, or discontinuity, spacing (JS); (4) the joint condition (JC), including its filling, aperture, alteration, persistence and roughness; (5) the groundwater condition (GW); and (6) the joint orientation (JO). He assigned numerical rating values for all these parameters. Based on the value of the RMR, Bieniawski divided the whole universe of rock masses into five classes and then assigned a stand-up time for each class (Hudson and Harrison, 2005).
The sum of the rating that corresponds to the five main parameters is referred to as the 'basic RMR' (Figure 1). However, the total RMR is obtained by adjusting the basic RMR to account for the influence of the joint orientation on a specific excavation face.
Like many other classification systems currently being used in engineering geological practice, the RMR often involves criteria whose values are assigned in linguistic terms. Practitioners and educators are familiar with the difficulty of capturing and communicating the experience and underlying assumptions of experts when trying to express the various states or levels of a classification criterion in linguistic terms. What do experts actually mean when they use terms related to approximation and possibility? How can we ensure that these terms mean the same thing in every instance and to every practitioner or expert? How can we utilize this fuzziness in expert opinion and the decisionmaking process? A fuzzy set approach reveals not only the basis for the experts' evaluations; it also makes them more objective, particularly through the process of setting functional expressions for the way in which the assigned values are perceived, believed, supported, or confidence in the values is assigned. In RMR processes, subjective (or non-random) uncertainties result from: (a) use of qualitative (linguistic) terms (as the input value for some criteria) whose meanings vary from one expert to another; (b) predetermined and sharp class boundaries, whereas the rock mass quality is gradational in nature; (c) prescribed rating (or weighting) scales representing the contribution (importance) of each criterion to the overall quality of the rock mass (assuming the overall quality is characterized perfectly by the criteria being used, and in all geological settings and applications); and (d) the reliability of the input value (quantitative and linguistic) for each criterion. Fuzzy set theory enables a soft classification approach to account for these uncertainties by allowing the expert (of a rock engineering project and/or a particular engineering geological environment) to participate in this process in several ways. A number of researchers have described the uses of fuzzy sets for rock mass classification. For instance, Hamidi (2009) has applied fuzzy set theory to rock engineering classification systems that analyse RMR and RME. Basarir (2007) has presented a fuzzy logic-based rippability classification system that highlights the limitations of blasting, direct ripping, and a rippability classification system in general. Furthermore, Jalalifar (2011) has predicted the rock mass rating using fuzzy logic while paying special attention to the discontinuities and groundwater conditions; he established the RMR by considering underground water from a non-fuzzy and fuzzy standpoint. Finally, Samimi Namin et al. (2004) used fuzzy logic to propose a method for investigating the changes in the strength and support system.
Fuzzy set
Fuzzy mathematics permits the 'uncertainty' surrounding the assessment of parameters to be included. Also, the application of this technique in rock mass classification is straightforward and direct, because fuzzy numbers may be assigned easily to the parameters in a rock mass classification scheme (Hudson and Harrison, 2005).
Fuzzy set theory is a generalization of ordinary or classical set theory. It consists of mathematical tools developed to model and process incomplete and/or gradual information, ranging from interval-valued numerical data to symbolic and linguistic expressions (Dubois and Prade, 2000).
We briefly summarize the findings by Ross (1995) and Klir et al. (1997) below to facilitate the discussion of fuzzy rock mass classifications.
Fuzzy theory started with the concept of fuzziness, and Zadeh (1965) first expressed it in the form of fuzzy sets. Fuzzy set theory provides the means for representing uncertainty using set theory. A fuzzy set is an extension of the concept of a crisp set. A crisp set allows only full membership or no membership to every element in a universe of discourse, whereas a fuzzy set allows for partial
membership. The membership or non-membership of an element x in the crisp set A is represented by the characteristic function of μ(A), which is defined by Equation [1]:

Fuzzy sets generalize this concept to partial membership by extending the range of variability of the characteristic function from the two-point set {0, 1} to the whole interval [0, 1]:

where U refers to the universe of discourse defined for a specific problem. If U is a finite set U = {x1, x2,..., xn}, then a fuzzy set A in this universe U can be represented by listing each element and its degree of membership in the set A as: μA(X) = {μA(X)(X1)/X1μA(X2) / X2, ... ,μA(Xn) / Xn}.
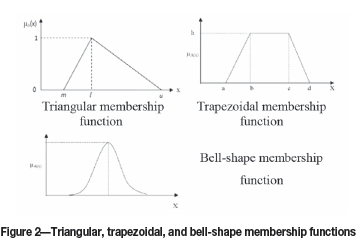
Fuzzy membership function
An element of the variable can be a member of the fuzzy set through a membership function that can take values in the range of 0 to 1. The membership function (MF) is determined by people with experience. The membership functions have different shapes: triangular, trapezoidal, piecewise-linear, Gaussian, bell-shaped, and so forth. In this study, triangular and trapezoidal membership functions are used (Figure 2). Points a, b and c in the triangular MF represent the x coordinates of the three vertices of μA(x) in a fuzzy set A: (a: lower boundary and c: upper boundary, where the membership degree is zero, b: the centre, where membership degree is 1). When an element belongs to a definite set, the fuzzy membership model (gradual membership degree) gives the fuzzy sets flexibility for modelling commonly used linguistic expressions, such as 'the uniaxial compressive strength of rock is high' or 'low water inflow', which are frequently used in rock engineering classification systems.
Fuzzy inference system
The Fuzzy Inference System (FIS) is a well-known computing system that is based on the concepts of fuzzy set theory, fuzzy if-then rules, and fuzzy reasoning (Ross, 1995). Several types of FIS have been employed in different applications. The most common models are the Mamdani fuzzy model, the Takagi- Sugeno-Kang (TSK) fuzzy model, the Tsukamoto fuzzy model, and the Singleton fuzzy model (El-Shayeb et al., 1997). Among the aforesaid models, the Mamdani model is used most often for algorithms. The Mamdani fuzzy algorithm takes the following form (Iphar and Goktan, 2006):
Rule i = If Xi1 is Ai1 and Xi2 is Ai2 and
Xin is Ain then y is Bt (for i = 1,2,..., k),
where x1 and x2 are the input variables, Air and Biare linguistic terms, r = 1, 2, i are fuzzy sets, i is the output variable, and k is the number of rules. Figure 3 provides an illustration of a two-rule Mamdani FIS, which derives the overall output 'z' when subjected to two crisp inputs, 'I' and 'y' (Jang et al., 1997). The 'x' and 'y' inputs represent the crisp values. For a set of disjunctive rules, the following equation gives the aggregated output for 'k2:
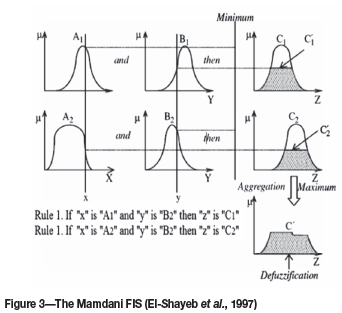

where μCk, μAk, and μBk are the membership functions of output 'z' for rule 'k', input 'x', and input 'y', respectively. It has a simple graphical interpretation, as shown in Figure 3.
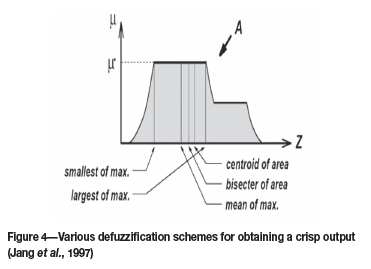
In Figure 3, the symbols A1 and B1 refer to the first and second fuzzy antecedents of the first rule, respectively. The symbol C1 refers to the fuzzy consequent of the first rule and A2 and B2 refer to the first and second fuzzy antecedents of the second rule, respectively, C2 refers to the fuzzy consequent of the second rule. The minimum membership value for the antecedents propagates through to the consequent and truncates the MF for the consequent of each rule. Then, the truncated MFs for each rule are aggregated. In Figure 3, the rules are disjunctive so the max aggregation operation results in an aggregated MF that is comprised of the outer envelope of the individually truncated membership forms from each rule. If a crisp value is needed for the aggregated output, an appropriate defuzzification technique should be employed to the aggregated MF (Ross, 1995). There are several defuzzification methods, including the Centroid of Area (COA), or Centre of Gravity, method, the Mean of Maximum method, and the Smallest of Maximum method (Grima, 2000). In Figure 4, the COA defuzzification method is used to obtain the numeric value of the output.
In this study, we apply the COA method to the defuzzification process because the calculations are easy to perform. The COA defuzzification method in a continuous domain is defined by the following equation:
where ZCOAis the crisp value for the z output and μA(z) is the aggregated output membership function.
RMR and related problems
The main problem when classifying the RMR is that we do not have a clear idea of the relationship between the levels of the abovementioned parameters, especially near the boundary conditions. In general, we can say that classifying the parameters in this way does not take into account the ambiguity of the boundary conditions because this kind of classifying is based on classic sets. For the most effective parameters in classifying the rock mass and expressing the quality of rock mass, the ROD should be between 0 and 100 and the rock mass divided into five levels: 'Very Bad', 'Bad', 'Average', 'Good', and 'Very Good'. The different levels express the quality of the rock mass. The percentage of ROD specifies the boundaries of these levels (see Table I)
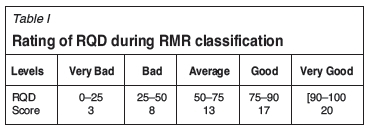
According to Table I, the ROD cannot be divided in this way near the boundary. For example, if the ROD is 89%, it is assigned to the 'Good' level, whereas when the ROD is 90%, it is assigned to the 'Very Good' level.
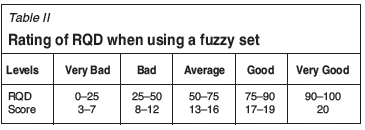
Table II shows that all RODs that are at the same level have the same effect on the RMR. In other words, we expect that if the ROD increases, the RMR will also increase. This is not true when classifying the ROD using the Bieniawski classification system.
FRMR software tool
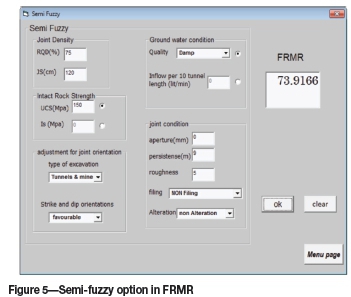
The Fuzzy Rock Mass Rating (FRMR) software tool classifies rock mass in indefinite situations. This software acts in three ways: semi-fuzzy, complete fuzzy, and quality fuzzy, as a means of specifying the RMR.
When the initial parameters are completely correct and reliable, and the area being examined does not change a great deal, the semi-fuzzy option shows good results (Figure 5).
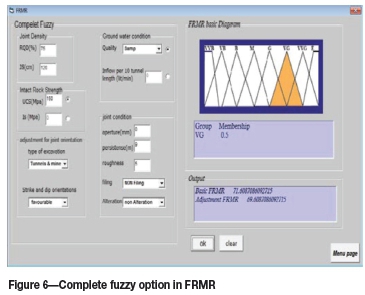
The second, or complete fuzzy option, should be used when the area changes a great deal, when the measurements are not done carefully, or when there is not enough input data to represent the whole area (Figure 6).
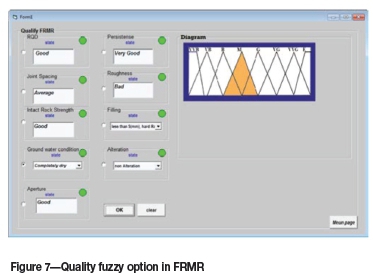
With the last option, quality fuzzy, there is no need for any input and the user specifies the quality of each input parameter and the ultimate RMR is a known beforehand. This option is useful for obtaining an entire view of the RMR without spending a great deal of time and money (Figure 7).
Semi fuzzy
Unlike crisp (ordinary) sets, fuzzy sets have no sharp or precise boundaries. As a result, the degree of membership A(x) of elements x to a fuzzy set A depends upon their positions (or compatibility) with respect to the centre (or the central concept). An element's position within a fuzzy set is determined by the degree of belief (or support) that the element belongs to that set. Thus, a fuzzy set is uniquely characterized by a membership function that expresses this support between 0 and 1.
Although Bieniawski's rock mass classification system often involves criteria whose values are assigned in membership, sharp class boundaries are a subjective uncertainty in rock mass classification. Fuzzy set theory enables a soft approach to account for these uncertainties. Actually, fuzzy sets make them more objective, particularly through the process of constructing membership functions. Because it is difficult to assign a number to the RMR parameter in the boundary zone between the classes, a fuzzy set can be used. An applied fuzzy set is shown in Table III.
Table III shows adjusted ratings and new floors, which are related to the 'point load strength index' and the 'UCS'.
The parameters have been divided into seven categories: (1) Very, Very Bad (VVB), (2) Very Bad (VB), (3) Bad (B), (4) Average (A), (5) Good (G), (6) Very Good (vG), and (7) Very, Very Good (VVG). The rating for each parameter can be obtained by using Table III. We used the related fuzzy sets to obtain the membership degree of each parameter. The fuzzy diagrams used for this model have been determined based on personal experience.
The fuzzy diagrams for the 'UCS' and the 'point load strength index' are presented in the Figures 8 and 9.
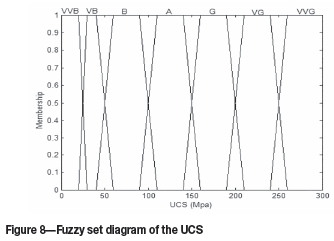
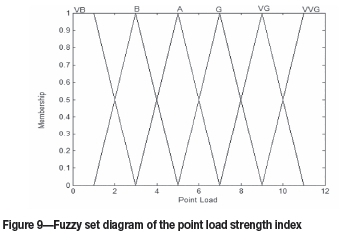
Table IV shows the adjusted and rated new levels that are related to the other parameters.
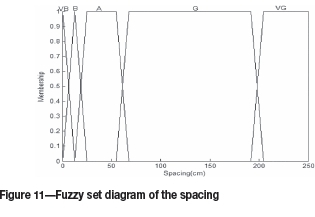
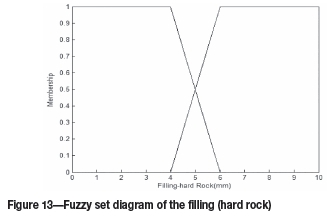
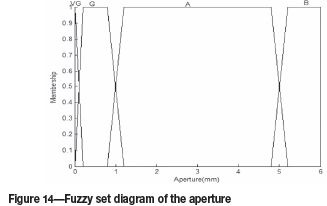
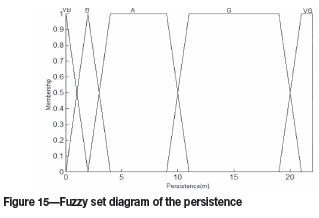
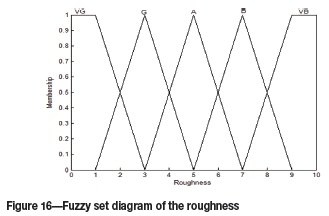
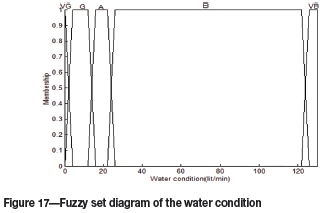
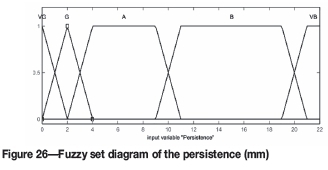
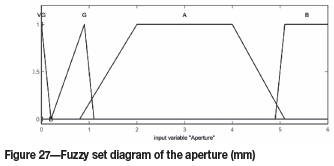
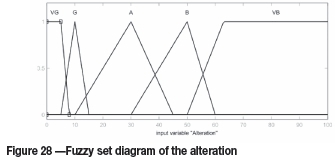
Figures 10 through 17 show the fuzzy diagrams for the 'ROD', 'spacing joint', 'filling' (hard rock), 'filling' (soft rock), 'aperture', 'roughness', 'persistence', and 'water condition'.,
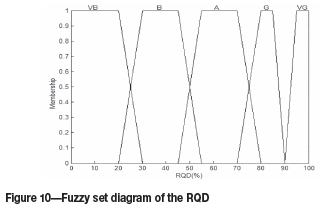
For the classification, we have divided the parameters into five floors: (1) 'Very Bad' (VB), (2) 'Bad' (B), (3) 'Average' (A), (4) 'Good' (G), and (5) 'Very Good' (vG).
Based on the fuzzy set diagram of the ROD (Figure 11), in order to calculate the rating of ROD, 75% of the membership degree with a value of 0.5 needs to belong to class A and G and the membership degree with a value of zero must belong to the other classes (VB, B, VG). The fuzzy ROD is calculated as follows:
0*3(Very Bad)+0*8(Bad)+0.5*13(Average)+
0.5*17(Good)+0*20(Very Good)=15

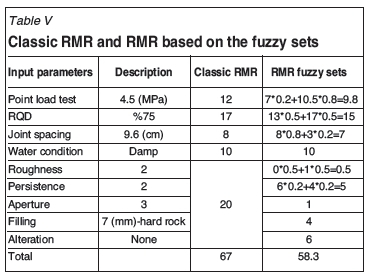
The rating of RMR shown in Table V has been obtained in two ways: firstly, using classic RMR (Bieniawski, 1989); and secondly, using RMR fuzzy sets.
When a mistake is made in determining the value of RMR, the solution involves one of two options:
(1) Determining the type and amount of maintenance necessary
(2) Determining the time of installation and maintaining stability.
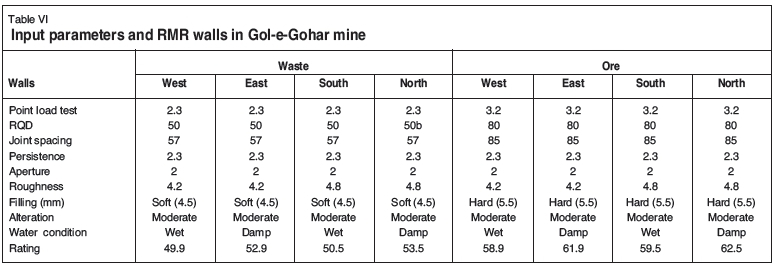
To determine the RMR in the Gol-e-Gohar mine and use it for different purposes, such as determining the geotechnical parameters of the rock mass or the stability of the slope, it is important to first ascertain that the RMR for the different mineral walls and waste material is calculated separately.
Table VI shows the calculations for each part of the mine (Shahriar et al., 2003).
Complete fuzzy
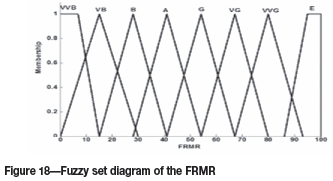
The main elements of a fuzzy algorithm are the input-output sets and the if-then rules. With this software tool, the Mamdani FIS was applied to the input parameters to select an appropriate RMR. The model includes nine input variables: (1) the UCS or point load strength index; (2) the ROD; (3) the spacing of the discontinuities; (4) the aperture of the discontinuities; (5) the filling of discontinuities; (6) the alteration; (7) the condition of the groundwater; (8) the persistence of the discontinuities; and (9) the roughness of the discontinuities. In general, the model includes three output variables: (1) the FRMR basic diagram and its membership; (2) the basic FRMR; and (3) the adjustment FRMR. The FRMR diagram includes eight levels: VVB, VB, B, A, G, VG, VVG, and E. These are shown in Figure 18.
In the model, triangular and trapezoidal membership functions were developed for the input variables because of their simplicity. For the input variables, the homogeneity of discontinuities was selected as a crisp set due to its qualitative nature and the lack of a sharp boundary for classification.
The other stage of the FIS involves constructing the if-then rules. The RMR rating system has nine main parameters, each including five levels (except for the aperture diagram). The permutation of the input parameters with the different levels is equal to 1 562 500. The number of if-then rules is 1 562 500 ((5^8)*4).
The overall structure of the Mamdani fuzzy inference is shown in Figure 19. The rule for FIS is as follows. If
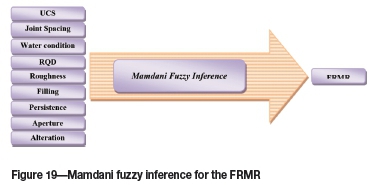
► UCS is B
► ROD is VG
► JS is M
► Aperture is VB
► GW is G
► Persistence is G
► Roughness is G
► Filling is VG, and
► alteration is VG, then
► SCORE is G.
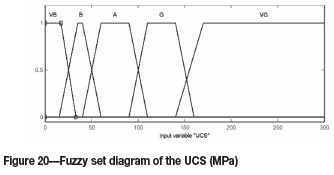
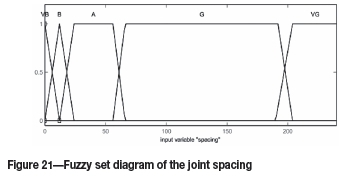
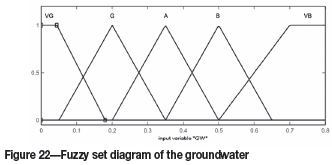
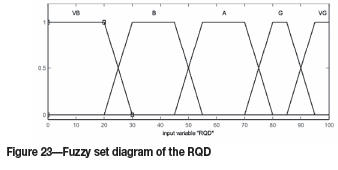
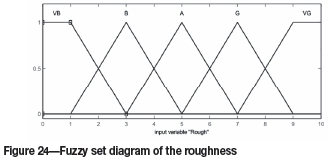
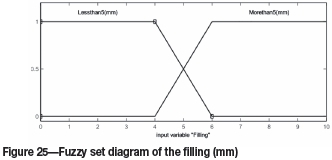
The last stage of the FIS is to select the defuzzification method. Aggregating two or more fuzzy output sets yields a new fuzzy set in the basic fuzzy algorithm. In most cases, the result, which is in the form of a fuzzy set, is converted into a crisp result via the defuzzification process. In this study, therefore, the COA method is employed for the defuzzification process because it is easy to perform the calculations with this method. The fuzzy set diagrams that have been used for this type of software are shown in Figures 20-28.
The example provided above makes this software option more clear. Table VII shows the entrance parameters.
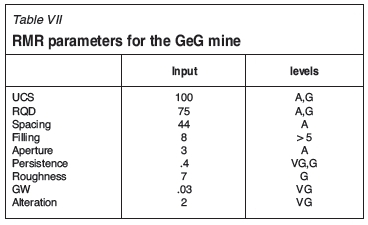
According to Figure 28, when the RQD is 75% it belongs to two levels: 'A' and 'G'. Table VII shows the level of the other entrance parameters.
According to the number of levels for the entrance parameters, eight rules (permutation of the input parameters with different levels) should be considered. Figure 29 shows the calculations for the fuzzy inference model.
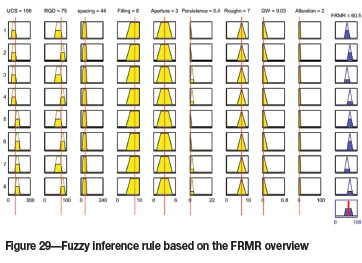
Fuzzy rules
1. If the (UCS is A) and the (RQD is A) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is VG) and the (roughness is G) and the (GW is VG), then the (FRMR is G)
2. If the (UCS is A) and the (RQD is G) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is VG) and the (roughness is G) and the (GW is VG), then the (fRMR is VG)
3. If the (UCS is A) and the (RQD is A) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is G) and the (roughness is G) and the (GW is VG), then the (FRMR is G)
4. If the (UCS is A) and the (RQD is G) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is G) and the (roughness is G) and the (GW is VG), then the (FRMR is VG)
5. If the (UCS is G) and the (RQD is A) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is VG) and the (roughness is G) and the (GW is VG), then the (FRMR is VG)
6. If the (UCS is G) and the (RQD is G) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is VG) and the (roughness is G) and the (GW is VG), then the (fRMR is VG)
7. If the (UCS is G) and the (RQD is A) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is G) and the (roughness is G) and the (GW is VG), then the (FRMR is G)
8. If the (UCS is G) and the (RQD is G) and the (spacing is A) and the (filling is more than 5) and the (aperture is A) and the (persistence is G) and the (roughness is G) and the (GW is VG), then the (FRMR is VG).
Figure 30 shows an example of the plan view for the boreholes. To show the ability of the software to predict the rock mass classification, the RMR is calculated in two stages.
First, 23 boreholes from a single area during the first stage are used, and then the number of boreholes from the same area is increased to 80.
The input parameters and final RMR results are presented in Table VIII.
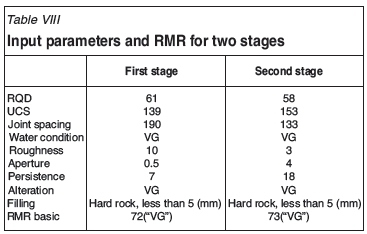
Table VIII shows that the number of holes during the first stage is much less than the number of holes during the second stage. The RMR for the region is calculated using the system proposed by Bieniawski (1989), which is different from the real RMR for the region. During the first stage, we used the semi-fuzzy part of the software and calculated the RMR as 72. During the second stage, we used the complete fuzzy part of the software and calculated the RMR as 73. According to the size of the region and dispersion amount of the rock mass, the previously mentioned number of holes could represent the region. Finally, we used the complete fuzzy option. The RMR basic value was 73 during the second stage and belonged to the 'VG' level. During the first stages, the RMR basic value could be considered representative of the whole region if it is calculated while considering the complete fuzzy part and by comparing the results (the RMR basic value for the second stage certifies this fact).
Conclusions
Rock engineering classifications are an integral part of empirical approaches to design in rock engineering. Despite their widespread use, the practical applications of the systems have some limitations, which may lead to their misuse. Since the geotechnical risk analysis for the face considered in this paper is based upon the experience of the geotechnical engineer in charge, computerized assistance is essential in aiding the judgment of the engineer so that the decision can be normalized and the analysis procedure automated. This type of analysis also needs to overcome the problems of uncertainties, imprecision, and vagueness when estimating the parameters. The fuzzy algorithms are used here to find a feasible solution to this problem; nonetheless, some points have to be re-considered, such as the definition of the classes for the input and the results as well as the reasoning rules. This work is difficult and requires the input of various experts and specialized engineers in the field of geotechnical engineering. It was our main concern in this paper to present the methodology of fuzzy reasoning for the quantification of risk. We have discovered that this method is applicable to our case and could be adapted to other cases and sites.
References
Aydin, A. 2004. Fuzzy set approaches to classification of rock masses. Journal of Engineering Geology, vol. 74. pp. 227-245. [ Links ]
Bieniawski, Z.T. 1973. Engineering classification of jointed rock masses. Transactions of the South African Institute of Civil Engineering, vol. 15. pp. 335-344. [ Links ]
Bieniawski, Z.T. 1974. Geomechanics classification of rock masses and its application in tunneling. Proceedings of the 3rd International Congress on Rock Mechanics, Denver, Colorado. International Society of Rock Mechanics. pp. 27-32. [ Links ]
Bieniawski, Z.T. 1976. Rock mass classifications in rock engineering. Proceedings of the Symposium on Exploration/or Rock Engineering. Johannesburg, South Africa. pp. 97-106. [ Links ]
Bieniawski, Z.T. 1979. The geomechanics classification in rock engineering applications. Proceedings of the 4th International Congress on Rock Mechanics, Montreux, Switzerland. international Society of Rock Mechanics. Vol. 2. pp. 41-48. [ Links ]
Bieniawski, Z.T. 1989. Engineering Rock Mass Classifications. Wiley, New York. 251 pp. [ Links ]
Dubois, D. and Prade, H. 1980. Fuzzy Sets and Systems: Theory and Applications. Academic Press, New York. 393 pp. [ Links ]
Dubois, D. and Prade, H. 2000. Fundamentals of Fuzzy Sets. Kluwer, Norwell, MA. p. 647. [ Links ]
Grima, M.A. 2000. Neuro-fuzzy Modelling in Engineering Geology. A.A. Balkema, Rotterdam. 244 pp. [ Links ]
Hudson, J.A. and Harrison, J.P. 2005. An Introduction to Engineering Rock Mechanics. (5th edn). imperial College of Science, Technology and Medicine, London.194 pp. [ Links ]
Iphar, M. and Goktan, R.M. 2006. An application of fuzzy sets to the digability index rating method for surface mine equipment selection. international Journal of Rock Mechanics and Mining Sciences, vol. 43. pp 253-266. [ Links ]
Klir, G.J., Clair, U.S., and Yuan, B. 1997. Fuzzy Set Theory: Foundations and Applications. Prentice Hall, New Jersey. pp. 245. [ Links ]
Riedmuller, G. and Schubert W. 1999. Rock mass modeling in tunneling versus rock mass classification using rating methods. Proceedings of the 37th US Rock Mechanics Symposium. Vail, Colorado. [ Links ]
Ross, T.J. 1995. Fuzzy Logic with Engineering Applications. McGraw- Hill, New York. [ Links ]
Samimi Namin, F., Jamshidi, H., Shahriar, K., and Kariminasab, S. 2004. investigation of the variations in strength, properties and load pressure support system using fuzzy method. 6th Tunnel Conference, Iran Science and industrial University, Tehran, iran. [ Links ]
Shahriar, K. and Bagherian, A. 2004. Exerting of uncertainty in rock mass classification using fuzzy sets. 6th Tunnel Conference, iran Science and industrial University, Tehran, Iran. [ Links ]
Shayeb, Y., Verdel, T., and Didier, C. 1997. Fuzzy reasoning for the analysis of risks in geotechnical engineering; Application to a French case. Proceedings of the 1997 International Symposium on Intelligent Design in Engineering Applications (IDEA'97), Aachen, Germany. Elite Foundation. pp. 101-105. [ Links ]
Singh, B. and Goel R.K. 1999. Rock Mass Classifications - A Practical Approach in Civil Engineering. Elsevier, Amsterdam. p. 267. [ Links ]
Stille H. and Palmstrom, A. 2003. Classification as a tool in rock engineering. Tunnelling and Underground Space Technology, vol. 18. pp. 331-345. [ Links ]
Takagi, T. and Sugeno, M. 1985. Fuzzy identification of systems and its application to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics, vol. 15, no. 1. pp. 116-132. [ Links ]
Thomas, C. 1993. Defuzzification in fuzzy controllers. Journal of Intelligent and Fuzzy Systems, vol. 1. pp. 109-23. [ Links ]
Williamson, D.A. and Kuhn, C.R. 1988. The unified classification system. Rock Engineering Systems for Engineering Purposes, ASTM STP 984. American Society for Testing Materials, Philadelphia. pp 7-16. [ Links ]
Zadeh, L.A. 1965. Fuzzy sets. Information and Control, vol. 8. pp. 338-353. [ Links ]
Zadeh, L.A. 1992. Fuzzy logic, neural networks, and soft computing. Course announcement, CS 294-4. University of California, Berkeley. [ Links ]
Paper received Jun. 2015.


{kind=link}
{kind=link}
{kind=link}