










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkJournal of the Southern African Institute of Mining and Metallurgy
On-line version ISSN 2411-9717
Print version ISSN 2225-6253
J. S. Afr. Inst. Min. Metall. vol.121 n.6 Johannesburg Jun. 2021
http://dx.doi.org/10.17159/2411-9717/1065/2021
PROFESSIONAL TECHNICAL AND SCIENTIFIC PAPERS
Navigation and positioning technology in underground coal mines and tunnels: A review
Y. CuiI, II; S. LiuI, II; Q. LiuI
ISchool of Mechatronic Engineering, China University of Mining and Technology, Xuzhou, Jiangsu, 221116, China
IIJiangsu Collaborative Innovation Center of Intelligent Mining Equipment, China University of Mining and Technology, Xuzhou, Jiangsu 221116, China
SYNOPSIS
To reduce the frequency of mining incidents and improve safety and production efficiency, it is important to develop technology for the autonomous positioning and navigation of mining equipment, without the assistance of satellite navigation signals. In this study we review the current technological environment for positioning and navigation underground and present several integrated navigation strategies. Existing underground positioning and navigation technology is described, and the performances of different methods based on this technology analysed and compared. The combination types and positioning effects of underground positioning and navigation strategies are discussed. Recent research directions for filtering methods and positioning estimation algorithms for underground positioning and navigation are reviewed. Finally, we summarize the future direction of underground positioning and navigation technology and related algorithms.
Keywords: coal mining; underground positioning and navigation, integrated navigation strategy, inertial navigation, positioning algorithms.
Introduction
Energy is the material basis for human survival and economic development. Coal, the demand for which continues to increase, accounts for approximately 25% of the world's primary energy supply. China's annual coal output from underground mines reached 3.3 billion tons in 2015. Shirong, Zhongbin, and Shibo (2016) surmised that there are more than 3 million miners in underground coal mines, working in harsh and dangerous conditions.
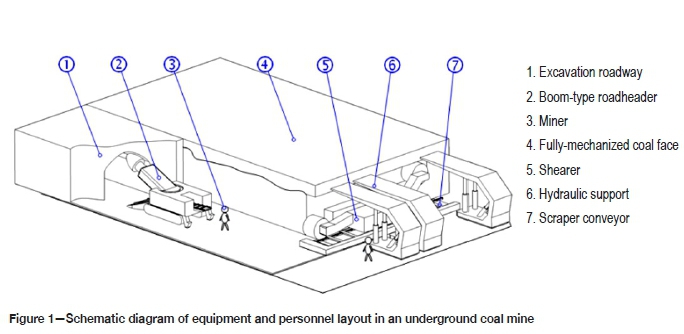
Figure 1 shows schematically the most important items of equipment. To ensure the coal mining and tunnelling equipment travels along the planned path and direction, the spatial position and running track of the equipment must be accurately determined. In the absence of satellite navigation signals, it is a difficult task to accurately determine the positioning and navigation of equipment and miners in underground coal mines due to the closed space and complex electromagnetic environment. Therefore, to mitigate mining safety risk and promote the technological revolution in coal mining, the development of intelligent and automatic navigation and positioning technology for miners and underground mining equipment is of great significance.
Underground positioning and navigation technology
According to the literature (Liu and Shi 2018), indoor navigation and location technology has become an important research topic internationally in recent years, and organizations and publications are keeping a watchful eye on developments. By the end of 2018, the number of intelligent mining faces in China had reached 145.
Numerous types of positioning and navigation technology and algorithms have been proposed and used for equipment and personnel positioning and navigation in underground mines and tunnels. According to the different detection principles, the existing technologies can be divided into the following categories:
➤ Intersection technology based on wireless communication signals
➤ Positioning technology based on visual image features
➤ Navigation technology based on inertial devices
➤ Positioning technology based on visible light communication (VLC).
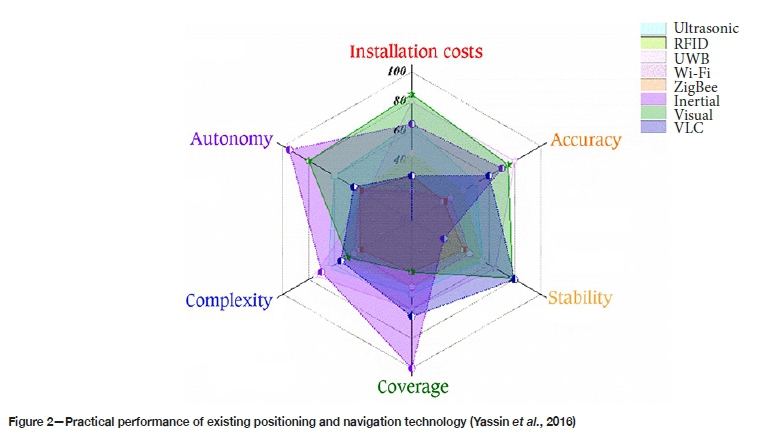
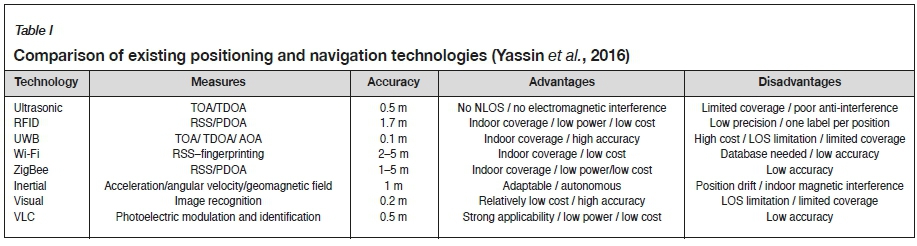
The implementation difficulty and basic accuracy of several positioning and navigation technologies are shown in Figure 2 and Table I (Yassin et al., 2016).
Intersection measuring technology based on wireless communication signals
Technologies include laser scanning positioning, radio frequency identification (RFID), Zigbee wireless, ultra-wideband (UWB), ultrasonic, and infrared positioning. This category of technologies can be divided into two kinds of distance measurement methods depending on the way in which signals are processed. Both methods estimate the specific positioning of the object by using the principle of trilateral and triangular positioning; however, the arrival time of spread spectrum signals and the attenuation of signal reception energy are used to complete the positioning methods.
Positioning technology using visual image features
This kind of positioning technology relies mainly on the motion analysis of image features collected by a visual sensor. The distance between the object to be positioned and the environmental background features can be determined using the visual distance projection model or the background image difference method. Current research suggests that this technology can generally achieve decimetre-scale accuracy (Yassin et al., 2016).
Navigation technology using inertial devices
Inertial devices are important for navigation, orientation, and motion carrier control. They can be used to detect acceleration, angle, impact, vibration, rotation, and multiple degrees-of-freedom motion. Inertial navigation technology is a kind of autonomous navigation, which can continuously determine the carrier position, attitude, speed, and other information in real time. This technology is not affected by climatic conditions or external interference factors and can offer high short-term accuracy. However, it is susceptible to serious long-term error accumulation problems.
Positioning technology using VLC
VLC is a new technology with the characteristics of high bandwidth, high frequency, and low electromagnetic radiation. The distance calculation methods include signal arrival angle, signal arrival time, signal image characteristics, light intensity, and light source ID. Transmitted information is compiled into a photoelectric signal and attached to the driving current of the light source by means of pulse width modulation. VLC, a potential downhole positioning technology, improves the positioning accuracy to the 1 m scale while enhancing the lighting effect in a coal mine.
However, the accuracy of the positioning technology described is seriously reduced in an uncontrolled indoor environment due to problems of signal attenuation caused by wireless signal reflection, non-line-of-sight (NLOS), and multi-path propagation effects (Zhou, Kavehrad, and Deng, 2012). Other signal sensors such as inertial measurement units (IMUs), cameras, and rangefinders can be incorporated to compensate for these problems. This improves the accuracy and robustness of the positioning system by fusing information from different positioning systems.
Integrated positioning and navigation strategies
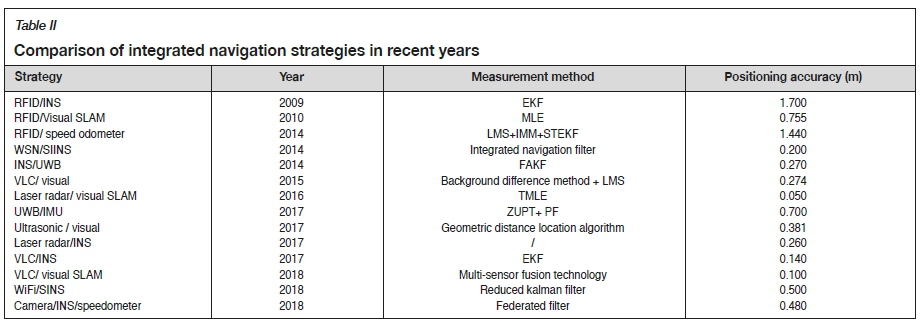
Increasing the number of locating nodes and readers is helpful in improving the positioning accuracy, although the deployment, management, and maintenance costs of such a system are high, and more than 75% of the installation time is spent on cables (Lynch and Loh, 2006). A combination of different location technologies can be used to address the limitations of single sensor positioning technology in practical applications (Retscher and Thienelt, 2004; Retscher and Kealy, 2006). Therefore, scholars are constantly working on integrated navigation and positioning strategies based on wireless sensor networks (WSNs). Recently, integrated positioning and navigation strategies have been proposed for the positioning and navigation of underground mining equipment and personnel (Retscher and Thienelt al, 2004). The characteristics of integrated strategies are shown in Table II.
Positioning strategies based on WSN
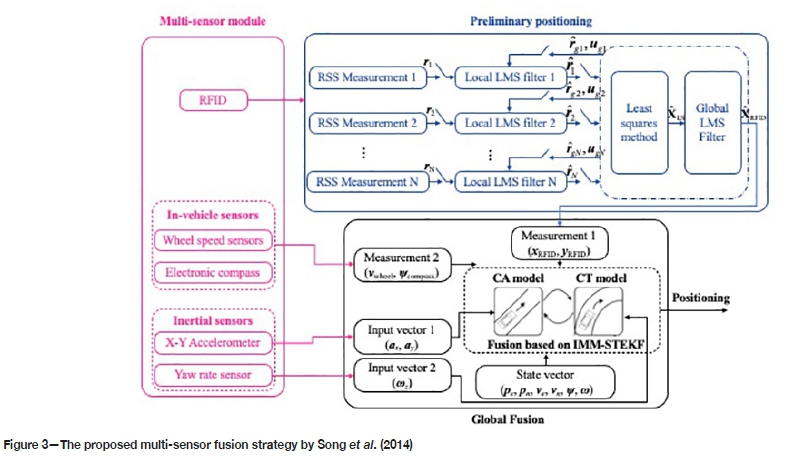
Fink and Beikirch (2012) incorporated link quantity information (LQnI) into weighted centroid localization technology with redundant sensor information based on distance estimation to improve indoor positioning. Redundant distance estimation based on the reciprocal sum of squares (RSS) combined with the LQnI method needs more infrastructure or processing power and can then easily improve the accuracy of location estimation. As shown in Figure 3, Song et al. (2014) proposed a kind of multiple sensor fusion positioning strategy for tunnel vehicles based on RFID and onboard sensors. RFID is used to estimate the initial position of vehicles in tunnels. Least mean squares (LMS), a federated Kalman filter, is adopted to provide initial position information to the global convergence algorithm. The global convergence algorithm based on the interactive multiple model fuses the preliminary position estimation results and low-cost automotive sensor data such as electronic compass and wheel speed sensor readings. The strong tracking extended Kalman filter algorithm is adopted to replace the traditional extended Kalman filter (EKF) algorithm and is used to ensure the robustness of the actual system parameters in the whole vehicle operation (Song et al., 2014).
The precision and accuracy of UWB from both a theoretical and a practical perspective using real data was assessed by MacGougan, O'Keefe, and Klukas (2009).
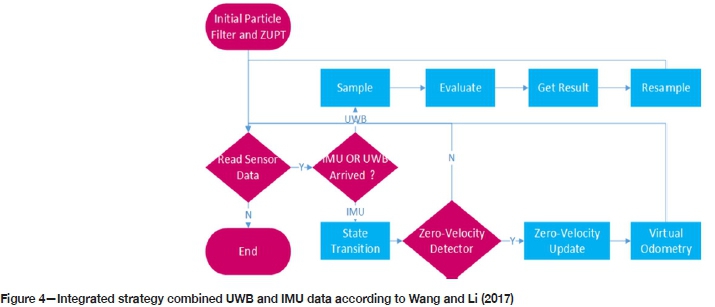
Wang and Li (2017) combined UWB and IMU data to achieve indoor positioning through particle filtering in an NLOS environment (Figure 4). The velocity and direction are obtained through integrating the acceleration and angular velocity based on the zero velocity update algorithm. The positioning strategy is executed by treating the IMU signal as the prior information of the particle filter and taking UWB observations as the basis for updating the weight. Experimental results show that the prior information provided by the IMU can suppress the observation error of UWB under an NLOS condition and that the positioning accuracy can be improved from the 1.6 m of a single UWB system to about 0.7 m. The IEEE 802.15.4a impulse radio UWB system achieves a ranging performance of under 30 cm (Oh, Park, and Kim, 2009).
Strategies based on visual image features
The concept of arranging RFID tag arrays in a known location is used to provide initial position information for the simultaneous localization and mapping (SLAM) algorithm. Errington, Daku, and Prugger (2010) presented a model for tag reception likelihood based on Fourier tesseral harmonics and a least-squares-based position estimator and evaluated it in underground and indoor experiments. A lowest average error of 20.49 cm was achieved in the underground experiment, and 75.53 cm in the indoor experiment.
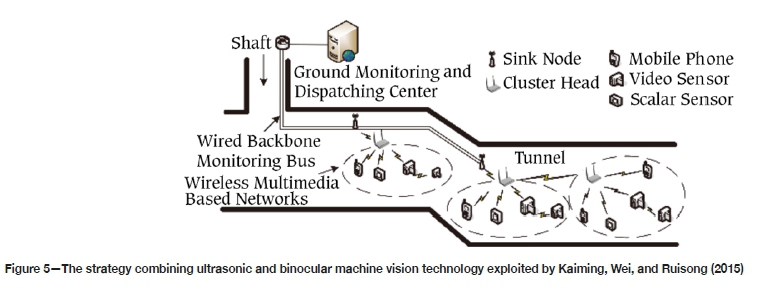
Kaiming, Wei, and Ruisong (2015) proposed a video-based collaborative positioning strategy (Figure 5) using miners' lamps for positioning miners under conditions of roadway turnout structures and poor illumination. To accurately detect the mining lamp image, the difference between the underground tunnel background image and the acquired video sequence image was obtained using a background difference method. Lines were established between the camera position point and the corresponding projection mapping point of the miner's lamp on the camera imaging plane. The least squares method was used to locate the miners by finding the optimal intersection of the lines. The plane error of the proposed strategy reached 0.274 m in a positioning test (Kaiming, Wei, and Ruisong, 2015).
Chen et al. (2016) applied the onboard lidar SLAM technology to a coal mining environment. They successfully generated 2D and 3D tunnel models using laser scanning matching technology and developed an improved, probabilistically motivated maximum likelihood estimation algorithm with an accuracy limited to approximately 5 cm under practical conditions. Indirect observation shows that the positioning accuracy of this method is at least one level higher than that of traditional methods.
Kai and Xianmin (2017) used a control strategy combining ultrasonic ranging technology and binocular machine vision image processing methods to improve the obstacle avoidance accuracy of a robot underground. Ultrasonic ranging technology and image processing methods are used to detect and observe remote obstacles, and the shape of the closed ranging, respectively. The binocular vision obstacle identification system based on a neural network and the obstacle avoidance strategy combining machine vision with image processing gave good experimental results for the inspection and avoidance of obstacles by the underground inspection robot.
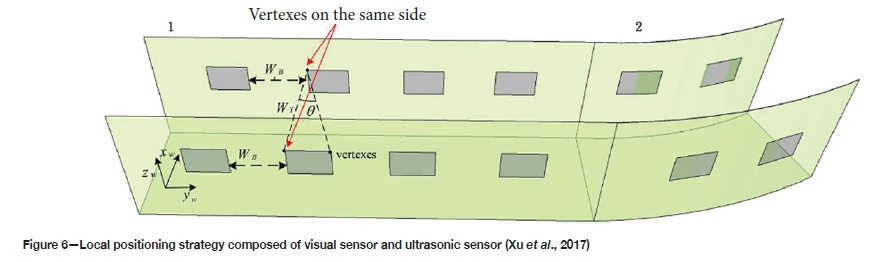
Xu et al. (2017) presented an autonomous positioning strategy for local region vehicles in coal mine tunnels based on visual and ultrasonic sensors (Figure 6). Unique barcode labels designed on the UPC-A code were arranged in pairs at intervals on the wall on each side of the tunnel and were recognized by two onboard visual sensors. An ultrasonic sensor was used to detect the distance between the vehicle centre and the left side of the tunnel wall. The distance between each barcode label feature frame and the vehicle centre point was determined using a visual distance projection model. Once the spatial geometric relationship between the barcode labels and the vehicle centre point was established, the 3D coordinates of the vehicle centre point in the tunnel global coordinate system were obtained. The average plane positioning error of the vehicle centre point was proved to be under 0.381 m in a localization test of autonomous vehicles in a coal mine tunnel.
Strategies based on inertial devices
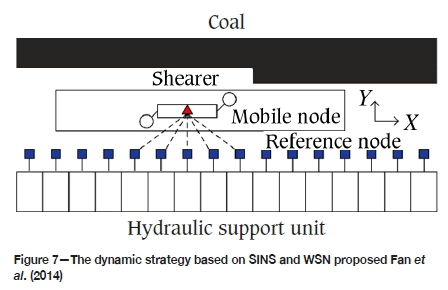
Zhang et al. (2009) combined an EKF with a 3D RFID positioning method and inertial navigation system (INS) to achieve accurate and continuous positioning and provide a 1.7 m accuracy for indoor positioning. Fan et al. (2014) presented a new dynamic location strategy (Figure 7) based on the coupling of a strapdown INS (SINS) and a WSN. A WSN positioning strategy is adopted to eliminate the accumulated error of SINS, after which the coupling model is established. Tracking performance on the attitude and position of a coal mining shearer was verified virtually and experimentally in real time with a positioning accuracy of 0.2 m.
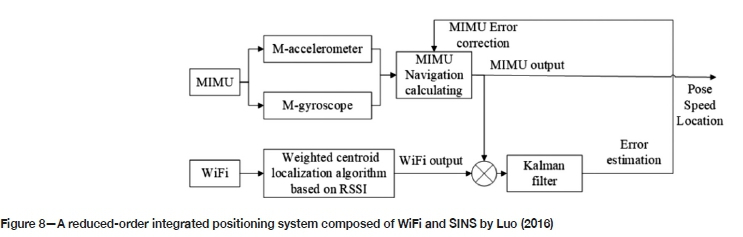
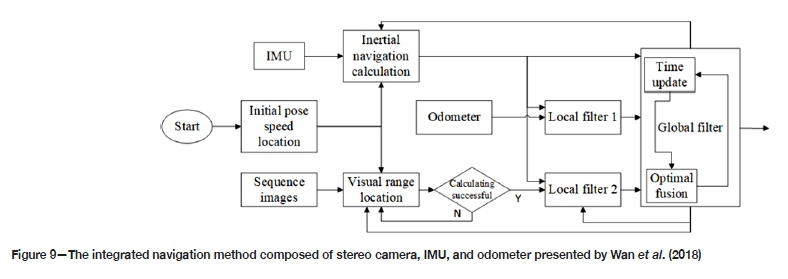
Implementation of a positioning system based on WiFi technology and SINS is highly complex and difficult to engineer. Luo (2016) therefore proposed a new reduced-order ten-state-variables integrated positioning system (Figure 8) and a reduced Kalman filter positioning algorithm by combining a micro IMU and WiFi. Belyaev (2017) proposed a method for underground measurement tasks using a mobile scanning system with inertial navigation. Position information for underground equipment relative to the environment determined by the mobile scanning system is a supplementary to motion parameters obtained by the inertial system. The experimental results showed that the maximum root mean square of the position error is within 0.26 m per 515 m. A high positioning accuracy with 0.5 m positioning error can be achieved based on the reduced-order integrated positioning system. Wan et al. (2018) proposed an integrated navigation method composed of a stereo camera, IMU, and odometer based on federal filtering. The method, shown in Figure 9, improves the positioning robustness of the system by forming two sub-filters of the IMU-odometer and camera-odometer, respectively. It was experimentally proved that the proposed method effectively improved the navigation and positioning accuracy of the moving platform to 0.48 m and achieved continuous positioning even if there were a failure of the stereo vision positioning system.
The multi modal mapping unit described by Mascarich et al (2018) tightly synchronizes visible light cameras with inertial sensors. Dense mapping of a GPS-denied, dark and visually degraded environment was achieved.
Strategies based on VLC
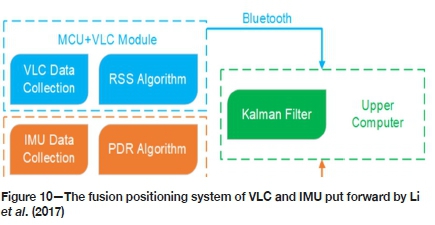
A fusion positioning system of VLC positioning and inertial navigation has been proposed (Li, Feng, and Yang, 2017; Li et al., 2017) based on an EKF to reduce the error caused by the multipath effect (Figure 10). The maximum positioning error of the system is 0.41 m and the average error is 0.14 m. A comparative analysis proved that the positioning accuracy of the fusion system is twice that of a VLC-based positioning system, and and four times that of an INS.
To reduce the high cost and prevent wall blocking in indoor positioning, a low-cost, high-efficiency, and high-precision indoor positioning system has been proposed by Wen et al. (2018). High-precision indoor positioning is achieved by adopting indoor LED lights as the positioning base station and using visual RGB depth (RGB-D) SLAM technology for 2D or 3D indoor mapping.
Research progress in positioning algorithms
According to the information needed in the process of positioning, sensor node localization algorithms commonly used in positioning systems can be divided into two broad categories: those based on distance and those that are not (Wang et al., 2011). Currently, signal processing and localization algorithms are required to be constantly updated for several of the proposed integrated navigation positioning systems to satisfy the reliability and robustness requirements of high-accuracy positioning systems. New methods of signal processing and filtering technology have appeared in recent years. System layouts and position estimation are described below.
Signal processing and filtering technology
Motion state constraints of multi-sensor navigation systems need to be considered to improve the positioning accuracy and reliability. Yang, Gao, and Zhang (2010) applied state constraints to the standard and robust Kalman filters to produce a robust Kalman filter with state constraints existing among the states of the multi-sensors in integrated navigation systems. It has been theoretically proved that the covariance matrix of the state vector estimated from the Kalman filter with constraints is indeed smaller than that from the unconstrained filters (Yang, Gao, and Zhang, 2010). To solve the problem that the filtering accuracy decreases rapidly and even diverges using the traditional linear Kalman filter strategy, Fan et al. (2014) proposed a fuzzy adaptive Kalman filter (FAKF) by ignoring the accurate measurement of noise prior data. INS/UWB systems using a FAKF filtering algorithm have better stability and real-time performance than traditional Kalman filters with the dynamic positioning error limited to 0.27 m (Fan , et al., 2014).
Aiming at the characteristics of nonlinear and non-Gaussian noise during indoor movement of people and equipment, Ruotsalainen et al. (2018) added the correct error probability density function, found through a maximum likelihood method, to the particle filter to build the bootstrap filter. The horizontal localization performance was significantly improved based on the measurement error statistical models of inertial and vision sensors.
Studies have shown (Dorais, Gawdiak, and Clancy, 2002; Heidari and Pahlavan, 2008) that ranging and positioning errors of time of arrival (TOA) were mainly affected by multi-path phenomena and propagation characteristics in NLOS scenes, and large-scale errors were common when a direct path pulse could not be detected. Aiming at the mismatch between Gaussian white noise and coloured noise, a channel classification-Kalman filter (CC-KF), a new distance mitigation algorithm, combining real channel classification and Kalman filtering, has been proposed to improve the distance mitigation performance under the indoor extreme environment of NLOS and the multi-path effect. The performance of CC-KF and four traditional TOA distance mitigation algorithms was compared in six typical indoor and underground environments. The minimum average absolute distance measurement error of the CC-KF algorithm has a minimum absolute ranging error of 1.01 m, which is obviously better than other algorithms (He et al., 2014). Bhatt et al. (2012) demonstrated that the knowledge-based source difference artificial neural network improves the navigation performance of low-cost sensors by 81% compared to the multi-layer perception, with or without external aiding sources.
System arrangement and location estimation
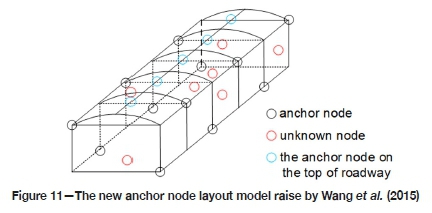
Problems caused by the low precision and instability of node layout models in WSN positioning are solved through a new beacon nodes arrangement method for underground coal mines proposed by Wang et al. (2015). Compared with traditional positioning methods, the method (Figure 11) needs fewer node resources on the premise of satisfying the positioning requirements. The time difference of arrival/angle of arrival hybrid algorithm is a 3D precise positioning algorithm used in coal mines. It is formed by the arrival time information and arrival angle information between the base station and the unknown node, and is used to achieve node positioning. Simulation results show that, based on the new node arrangement model, the algorithm has good positioning accuracy and stability and meets the positioning requirements in a coal mine.
Yi, Tao, and Jun (2017) treated the reciprocal of the sum of the target nodes RSS values received by each anchor node participating in positioning as the weight factor, and proposed a weighted trilateral method based on the traditional trilateral algorithm. By adopting the Grubbs deviation test to reduce the influence of the Kalman filter on the peak value of the pulse deviation, a hybrid filtering algorithm was designed. It is surmised that the improved positioning method together with the hybrid filtering algorithm has a high positioning accuracy of 0.95 m (Yi, Tao, and Jun, 2017).
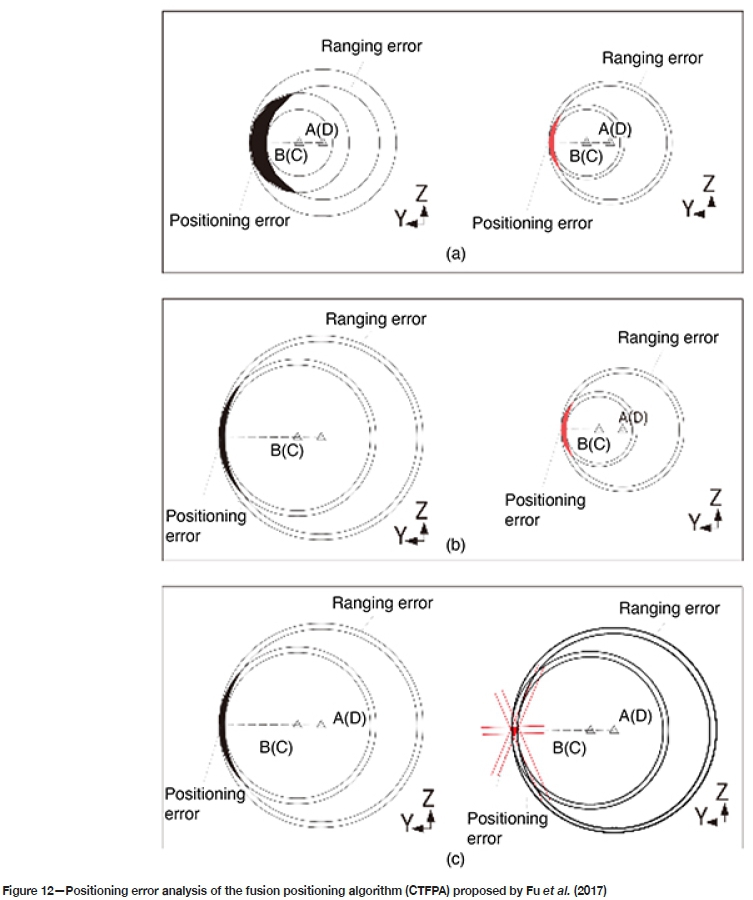
To achieve unmanned position and pose detection of a boomtype roadheader in a coal mine, Fu et al. (2017) designed a UWB pose detection system composed of four UWB positioning base stations and three roadheader positioning nodes, and proposed a fusion positioning algorithm based on the Caffery transform and Taylor series expansion (CTFPA). Three attitude angles (heading angle, pitching angle, and rolling angle) of the machine body are solved based on the system TOA location model (shown in Figure 12) using 12 groups of distance measurement information between every base station and the nodes. The ranging accuracy experiment of the UWB P440 module was conducted in a narrow and closed tunnel. The experimental data showed that the mean error and standard deviation of this module can reach 2 cm (Fu et al., 2017). Combined with the shearer cutting process as a non-holonomic constraint, an optimal error compensation model of system positioning closed path was established by Zhang (2017) based on the nondeterministic study on the position and pose drift of the inertial positioning navigation system for a coal shearer. The optimal error compensation model of the system-positioning closed path was established to improve the positioning accuracy of the inertial navigation system by nearly 50% (Zhang, 2017).
Summary and future studies
The progress made through the latest research on underground positioning and navigation technologies has been introduced and recently proposed integrated navigation strategies and positioning methods summarized. The propagation of underground signals suffers serious attenuation, reflection interference, and environmental sensitivity due to the NLOS phenomenon, the multipath effect, and wall interference. Current single navigation and positioning technologies are unable to meet the requirements in coal mine positioning. Underground positioning technology based on multi-sensor fusion and independent navigation systems without external node information are extremely promising to improve the accuracy and robustness of underground navigation and positioning systems. In addition, research into navigation and positioning algorithms may focus on calibration methods for position error estimation and refinement filtering processing of nonlinear signals to improve the stability and timeliness of the integrated navigation strategy.
Acknowledgements
This work is supported by the National Natural Science Foundation of China (No. 51975570), the Xuzhou Science and Technology Achievements Transformation Plan (KC20203), the Top-notch Academic Programs Project of Jiangsu Higher Education Institutions (TAPP) and Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).
Disclosure statement
No potential conflict of interest was reported by the authors.
References
Belyaev, E.N. 2017. Extended investigation into continuous laser scanning of underground mine workings by means of Landis inertial navigation system. IOP Conference Series: Earth and Environmental Science, vol. 87, no. 5. 052002. [ Links ]
Bhatt, D., Aggarwal, P., Devabhaktuni, V., and Prabir, B. 2012. A new source difference artificial neural network for enhanced positioning accuracy. Measurement Science and Technology, vol. 23, no. 10. pp. 105101-105111. [ Links ]
Chen, Y., Tang, J., Hyyppä, J., Wen, Z., Li, C., and Zhu, T. 2016. Mobile laser scanning based 3D technology for mineral environment modeling and positioning. Proceedings of the Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, 2-4 November 2016. IEEE, Piscataway, NJ. pp. 289-294. [ Links ]
DoRAis, G.A., Gawdiak, Y., and Clancy, D. 2002. The challenge of planning and execution for spacecraft mobile robots, NTRS Technical Report, 2002. https://ntrs.nasa.gov/search.jsp?R=20020052409 [ Links ]
Errington, A.F.C., Daku, B.L.F., and Prugger, A. 2010. Initial position estimation using RFID tags: A least-squares approach. IEEE Transactions on Instrumentation and Measurement, vol. 59, no. 11. pp. 2863-2869. [ Links ]
Fan, O., Yaheng, W., Jing, H., Wu, L., Yu, Z., and zhou, L. 2014. Integrated navigation fusion strategy of INS/UWB for indoor carrier attitude angle and position synchronous tracking. The Scientific World Journal, vol. 2014. pp. 1-13. [ Links ]
Fan, O.,, Li, W., Hui, J., Wu, L., Yu, Z., Yan, W., and Zhou, L. 2014. Integrated positioning for coal mining machinery in enclosed underground mine based on SINS/WSN. The Scientific WorldJournal, vol. 2014. doi: 10.1155/2014/460415 [ Links ]
Fink, A. and Beikirch, H. 2012. Adding link quantity information to redundant RF signal strength estimates for improved indoor positioning. Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia. IEEE, Piscataway, NJ. pp. 1-6. [ Links ]
Fu, S., Li, Y., Zhang, M., Zong, K., Cheng, L., and Wu, M. 2017. Ultra-wideband pose detection system for boom-type roadheader based on Caffery transform and Taylor series expansion. Measurement Science and Technology, vol. 29, no. 1. https://iopscience.iop.org/article/10.1088/1361-6501/aa91c0/pdf . [ Links ]
Ge, S.R., Wang, Z.B., and Wang, S.B. 2016. Study on key technology of internet plus intelligent coal shearer. Coal Science & Technology, vol. 44, no. 7. pp. 15-21. [ Links ]
He, J., Geng, Y., Liu, F., and Xu, C. 2-14. CC-KF: enhanced TOA performance in multipath and NLOS indoor extreme environment. IEEE Sensors Journal, vol. 14, no. 11. pp. 3766-3774. [ Links ]
Heidari, M. and Pahlavan, K. 2008. Identification of the absence of direct path in TOA-based indoor localization systems. International Journal of Wireless Information Networks, vol. 15, no. 3-4. pp. 117-127. [ Links ]
Kai, H. and Xianmin, M. 2017. Research on avoidance obstacle strategy of coal underground inspection robot based on binocular vision. Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing. IEEE, Piscataway, NJ. pp. 6732-6737. [ Links ]
Kaiming, Y., Wei, Y., and Ruisong, H. 2015. The video collaborative localization of a miner's lamp based on wireless multimedia sensor networks for underground coal mines. Sensors, vol. 15, no. 10. pp. 25103-25122. [ Links ]
Li, Z., Feng L., and Yang A. 2017. Fusion based on visible light positioning and inertial navigation using extended Kalman filters. Sensors, vol. 17, no. 5. doi: 10.3390/s17051093 . [ Links ]
Li, Z. Yang, A., Lv, H., Feng, L., and Song, W. 2017. Fusion of visible light indoor positioning and inertial navigation based on particle filter. IEEE Photonics Journal, vol. 9, no. 5. pp. 1-13. [ Links ]
Liu, G. and Shi, L. 2018. An overview about development of indoor navigation and positioning technology. Journal of Navigation and Positioning, vol. 6, no. 2. pp. 7-14. [ Links ]
Luo, Y. and Yang, Y. 2016. Mine personnel position algorithm based on reduced-order integrated positioning system. Electronic Measurement Technology, vol. 36, no. 5. pp. 93-96. [ Links ]
Lynch, J.P. and Loh, K.J. 2006. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock and Vibration Digest, vol. 38, no. 2. pp. 91-130. [ Links ]
MacGougan, G., O'Keefe, K., and Klukas, R. 2009. Ultra-wideband ranging precision and accuracy. Measurement Science and Technology, vol. 20, no. 9. pp. 1-13. [ Links ]
Mascarich, F., Khattak, S., Papachristos, C., and Alexis, K. 2018. A multi-modal mapping unit for autonomous exploration and mapping of underground tunnels. Proceedings of the IEEE Aerospace Conference, Big Sky, MT. IEEE, Piscataway, NJ. pp. 1-7. [ Links ]
Oh, M., Park, J., and Kim, J. 2009. IR-UWB packet-based precise ranging system for u-Home networks. IEEE Transactions on Consumer. Electronics, vol. 55, no. 1. pp. 119-125. [ Links ]
Retscher, G. and Kealy, A. 2006. Ubiquitous positioning technologies for modern intelligent navigation systems. Journal of Navigation, vol. 59, no. 1. pp. 91-103. [ Links ]
Retscher, G. and Thienelt, M. 2004. NAVIO - A navigation and guidance service for pedestrians. Positioning, vol. 3, no. 1-2. pp. 208-217. [ Links ]
Ruotsalainen, L., Kirkko-Jaakkola, M., Rantanen, J., and Mãkelà, Μ. 2018. Error modelling for multi-sensor measurements in infrastructure-free indoor navigation. Sensors, vol. 18, no. 2. pp. 590. [ Links ]
Song, X., Li, X., Tang, W., Zhang, W., and Li, B. 2014. A hybrid positioning strategy for vehicles in a tunnel based on RFID and in-vehicle sensors. Sensors, vol. 14, no. 12. pp. 23095-23118. [ Links ]
Wan, W., Li Υ., Hu, W., Zhao, O., Sun, X., Zhang, 0., Di, K., Guo, Η., and Wu, L. 2018. Mobile platform localization by integration of stereo cameras, IMU and wheel odometer based on federated filter. Geomatics and Information Science of Wuhan University, vol. 43, no. 1. pp. 101-106. [ Links ]
Wang, F., Wang, C., Wang, Z.J,, Zhang, X., and Shang, C. 2015. Research on 3D localization algorithm of wireless sensor networks in underground coal mine. Proceedings of the Sixteenth Workshop on Mobile Big Data, Hangzhou, China. Association for Computing Machinery, New York. pp. 53-57. [ Links ]
Wang, G., Liu, H., Hu, H., and Shen, S. 2011. Indoor localization algorithm: A survey. Journal of Nanjing University of Posts and Telecommunications (Natural Science), vol. 31. pp. 16-22. [ Links ]
Wang, Y. and Li, X. 2017. The IMU/UWB fusion positioning algorithm based on a particle filter. ISPRS International Journal of Geo-Information, vol. 6, no. 8. pp. 235. [ Links ]
Wen, C., You, C., Peng, L., Wu, T., Song, B., and Lv, B. 2018. Research on indoor visible light positioning system based on SLAM maps. Proceedings of the International Conference on Image and Video Processing, and Artificial Intelligence, Shanghai .International Society for Optics and Photonics. doi: 10.1117/12.2512460 [ Links ]
Xu, Z., Yang, W., You, K., and Kim, Y. 2017 2017. Vehicle autonomous localization in local area of coal mine tunnel based on vision sensors and ultrasonic sensors. PloS One, vol. 12, no. 1. https://doi.org/10.1371/journal.pone.0171012. [ Links ]
Yang, Y., Gao, W., and Zhang, X. 2010. Robust Kalman filtering with constraints: A case study for integrated navigation. Journal of Geodesy, vol. 84, no. 6. pp. 373-381. [ Links ]
Yassin A , Nasser Y , Awad M , Al-Dubai, A., Liu, R., Yuen, C., Raulefs, R., and Aboutanios, E. 2016. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Communications Surveys & Tutorials, vol. 19, no. 2. pp. 1327-1346. [ Links ]
Yi, L., Tao, L., and Jun, S. 2017. RSSI localization method for mine underground based on RSSI hybrid filtering algorithm. Proceedings of the IEEE 9 th International Conference on Communication Software and Networks (ICCSN). Guangzhou, China. IEEE, Piscataway, NJ pp. 327-332. [ Links ]
Zhang, B. 2017. Research on dynamic accurate positioning method of shearer. Master's thesis, School of Mechatronic Engineering, China University of Mining and Technology, Beijing, [ Links ]
Zhang, K., Zhu, M., Retscher, G., Wu, F., and Cartwright, W. 2009. Three-dimension indoor positioning algorithms using an integrated RFID/INS system in multistorey buildings. Location Based Services and TeleCartography II. Springer, Berlin, Heidelberg. pp. 373-386. [ Links ]
Zhou. Z., Kav ehrad, M., and Deng, P. 2012. Indoor positioning algorithm using light-emitting diode visible light communications. Optical Engineering, vol. 51, no. 8. p. 085009. [ Links ] ♦
 Correspondence:
Correspondence:
Y. Cui S. Liu
Email: Cuiyuming1122@163.com lsycumt@163.com
Received: 10 Dec. 2019
Revised: 23 Feb. 2021
Accepted: 29 Apr. 2021
Published: June 2021
ORCID Y Cui https://orchid.org/0000-0001-5648-1825
ORCID S. Liu https://orchid.org/0000-0002-2801-7969
ORCID Q. Liu https://orchid.org/0000-0002-7426-715X


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}