










Servicios Personalizados
Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
Indicadores

Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkJournal of the Southern African Institute of Mining and Metallurgy
versión On-line ISSN 2411-9717
versión impresa ISSN 2225-6253
J. S. Afr. Inst. Min. Metall. vol.115 no.3 Johannesburg mar. 2015
GENERAL PAPERS
A stochastic simulation framework for truck and shovel selection and sizing in open pit mines
S.R. DindarlooI; M. OsanlooII; S. FrimpongI
IDepartment of Mining and Nuclear Engineering, Missouri University of Science & Technology, Bella, MO
IIDepartment of Mining and Metallurgical Engineering, Amirkabir University of Technology, Tehran, Iran
SYNOPSIS
Material handling in open pit mining accounts for about 50% of production costs. The selection and deployment of efficient, safe, and economic loading and haulage systems is thus critical to the production process. The problems of truck and shovel selection and sizing include determination of the optimal number and capacities of haulage and loading units, as well as their allocation and operational strategies. Critical survey and analysis of the literature has shown that deterministic, stochastic, and experimental approaches to these problems result in considerably different outputs. This paper presents a comprehensive simulation framework for the problem of truck and shovel selection and sizing based on the random processes underlying the network-continuous-discrete event nature of the mining operation. The framework builds on previous research in this field and attempts to address limitations of available methodologies in the form of a comprehensive algorithm. To test the validity of the framework a large open pit mine was evaluated. The stochastic processes governing the uncertainties underlying the material loading and haulage input variables were defined and built into the stochastic model. Discrete event simulation was used to simulate the stochastic model. The proposed model resulted in several modifications to the case study.
Keywords: truck and shovel operation, stochastic simulation framework, equipment selection and sizing.
Introduction
There are three different mechanisms of discrete, continuous, and hybrid material transportation in open mines, including (but not limited to) (i) truck and shovel system (discrete), (ii) slurry piping (continuous), and (iii) in-pit crusher and conveyor belts (hybrid). Although each mechanism has its own advantages, the truck and shovel system is the dominant method of material loading and handling in open pit mines, owing to its high production rate, excellent flexibility, relatively low operating and capital costs, and good maintainability. General objectives of optimal equipment selection include (i) meeting the long- and short-term requirements of production rates, (ii) human and equipment safety, (iii) environmental protection, and (iv) economic operations (Figure 1).
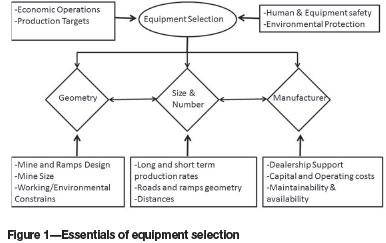
The two most important decision factors regarding selection of a truck and shovel system are the equipment geometry and size.
Geometry (equipment width, weight, turning radius, swing angle, etc.) is controlled mostly by mine design and layout, as well as the operational constraints. After selection of a favorable geometry based on the constraints, the next step is to select the equipment manufacturer. Once the geometry and manufacturer are selected, the next step is to decide on the models (bucket size) and required numbers of each unit.
Because of the undeniable effect of a proper truck-shovel system selection and sizing plan on open pit mines economics, many researchers have tried to study this issue using different techniques such as linear programming (Edwards, Malekzadeh, and Yisa, 2001), analytical hierarchy process (Ayağ, 2007), nonlinear programming (Søgaard and Sørensen, 2004), genetic algorithms (Aghajani, Osanloo, and Akbarpour, 2007; Marzouk and Moselhi, 2003), mixed integer programming (Camarena, Gracia, and Cabrera Sixto, 2004), machine repair modelling (Krause and Musingwini, 2007), queuing theory (Komljenovic, Paraszczak, and Fytas, 2004), and conventional spreadsheet calculations based on experience, engineering judgment, and manufacturers' catalogues (Burt et al., 2005). Due to the large number of parameters that affect the system performance and the stochastic nature of the input variables, developing a deterministic mathematical optimization solution for the problem is extremely difficult, if not impossible (Haldar and Mahaderan, 2000).
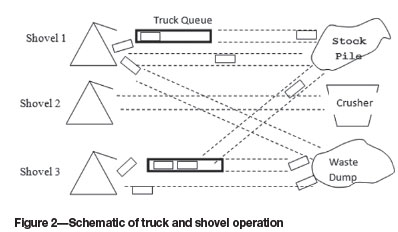
A truck and shovel operation is a set of discrete-event activities, i.e. loading, hauling, dumping, and returning, which all occur in a stochastic manner (Figure 2). Discrete-event system simulation (DES) is a modelling method for such time-discrete and probabilistic phenomena (Schriber, 1992). Other abovementioned techniques have different limitations in addressing this problem comprehensively and accurately (Schriber, 1991). These limitations include deterministic pre-assumptions and/or not considering the real-world system specifications through derivation and application of relevant time-frequency distributions for the different operations involved. Most of these techniques therefore do not lead to robust models (Burt et al., 2005). However, DES has been employed by different researchers in mining engineering through available software and languages such as GPSS, SIMAN-ARENA, and SLAM (Baffi and Ataeepur, 1996; Runciman, Vagenas, and Newson, 1996; Awuah-Offei, Temeng, and Al-Hassan, 2003; Ross et al., 2010; Sturgul, and Thurgood, 1993). Most of the studies to date have endeavoured to evaluate some what-if scenarios in order to understand the possible effects of changing different input variables on the overall economics of current operating mines. For instance, (Stout et al., 2013) used Arena to simulate a truck and shovel operation. Very good background reviews of the application of this technique in the mining industry can be found in Sturgul, (1995, 1999) and Hollocks, (2006).
Previous studies (Burt et al., 2005) have shown that different approaches, including deterministic, stochastic, and experimental methodologies, result in considerable differences in outputs. These techniques lead to different solutions regardless of the quality of the technique/software itself or the knowledge of the modelling team. Hence, the first step is to develop a comprehensive simulation framework for the problem of truck and shovel selection, sizing, and dispatching in open pit mines that obtains nearly the same optimal results for the same input variables, regardless of the technique employed (Burt, and Caccetta, 2014). In this study, a simulation technique was selected to solve the problem due to: i) possibility of incorporating uncertainties in different governing activities of the system, ii) extensive background of application of the technique in previous research and real world practices, iii) dynamic nature of the technique, which makes it applicable during the entire life of mine, and iv) relatively wide range of available software and languages.
This paper introduces a methodology and sensitivity analysis procedure for mine loading and haulage system selection and sizing. In addition, the capability of the DES technique in bulk material handling simulation is demonstrated through the application of the GPSS/H simulation language. The proposed framework was validated and tested in a large open pit mine. All steps in the proposed framework were followed attentively to ensure its effectiveness. However, due to space limitation, only the most important main components are discussed here, i.e. problem definition, data acquisition, statistical analysis, simulation language (technique) selection, model construction, model verification and validation, and sensitivity analysis. More information about the simulation history and GPSS/H background is given in Schriber (1992), Hollocks (2006), Nance (1995), Pidd and Carvalho (2006), and Robinson, (2005). The paper is organized as follows:
> Proposed simulation frameworks for both new and existing systems
> Introduction of the case study
> Model building, verification, and validation
> Flow chart for performing sensitivity analysis
> Results, with a discussion of the optimal results
> Concluding remarks.
Several important steps of simulation of the case study are presented in more details in the Appendix.
Simulation framework
The lack of a comprehensive simulation framework in this field has resulted in considerably different solutions to the problem of truck and shovel system selection and sizing. Major source of these confusing differences include, but are not limited to:
> Different simulation approaches
> Different data requirements (quantity, quality, and statistical methodology)
> Insufficient technical communication during all phases of the project
> Insufficient determination of the objectives, resources, and constraints.
This study proposes a truck and shovel simulation framework for minimizing the errors due to erroneous or inaccurate assumptions and procedures, and provides a step-by-step simulation guideline. The algorithm attempts to render a framework for truck and shovel operation simulation. In the construction of the simulation framework, different blocks (Figure 2) were obtained from most of the available journal articles. The most important findings of the previous studies were selected and incorporated to achieve an efficient simulation strategy.
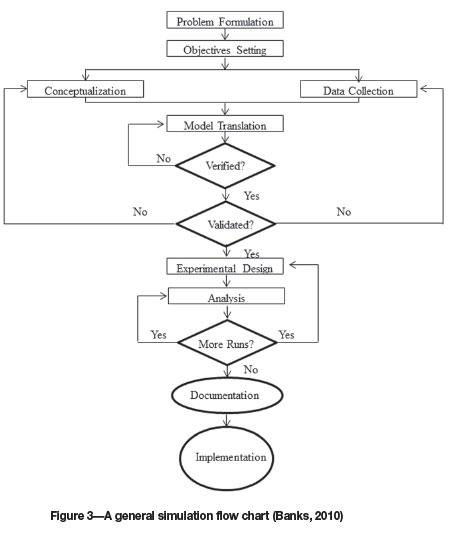
The first step in developing this framework, with the goals of completeness, comprehensiveness, and robustness, was to identify the major components of a general simulation modelling practice, regardless of the area of application. A general simulation framework is illustrated in Figure 3. This primary platform was set to serve as the structure of the framework and consequently was customized through the introduction of open pit mining specifications. These specified characteristics were derived from published articles in the field of mining operations simulation and modelling and were incorporated in the base structure. The base framework was composed of the following components:
> Problem definition, objectives, resources, and limitations:
> Data acquisition and statistical processing
> Model construction
> Model modification, verification, and validation
> Sensitivity analysis and decision-making strategies.
It should be noted that there are several pitfalls in a general simulation practice (Maria, 1997) as follows: unclear objective, invalid model, simulation model too complex or too simple, erroneous assumptions, undocumented assumptions, and using the wrong input probability distribution.
The above pitfalls were incorporated in the proposed simulation framework for the truck and shovel selection and sizing problem.
The secondary mine-specific characteristics that contribute to mining operational performance include:
(1) Incorporation of the mining-environmental induced constraints
(2) Different traffic-dispatching scenarios
(3) Different loading methods
(4) Selection of hybrid or uniform loading/haulage fleets.
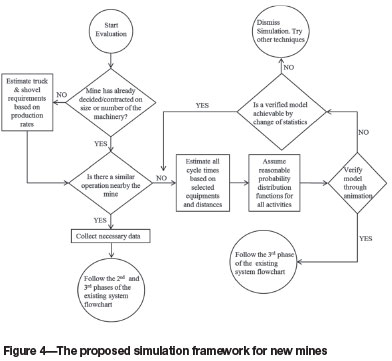
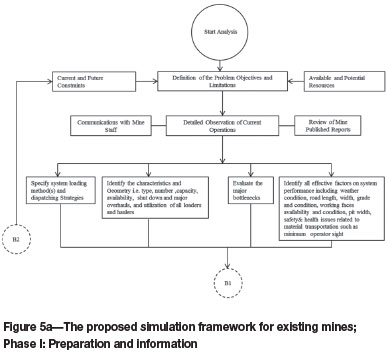
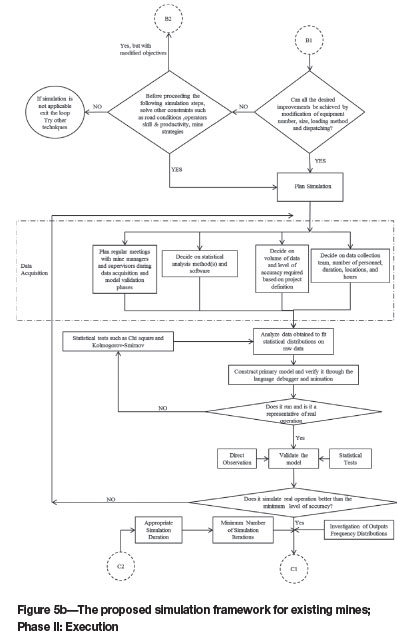
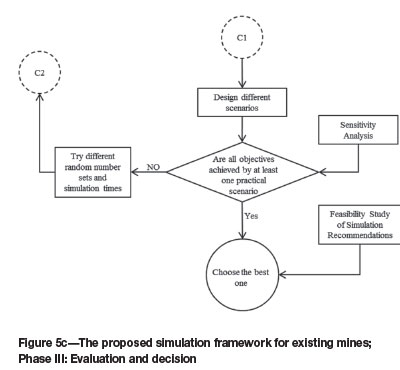
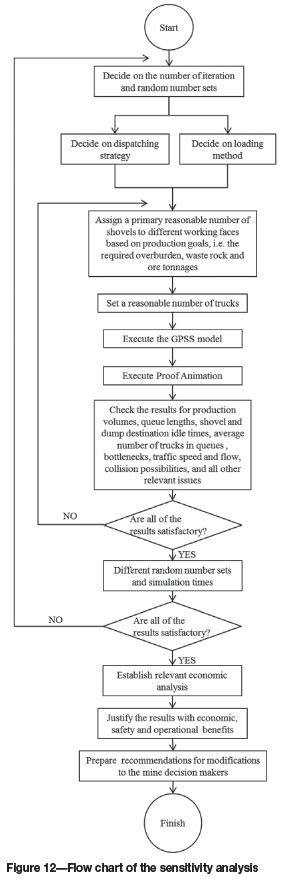
The framework is divided in two categories, for new and existing systems (Figures 4 and 5 respectively). Since in a new mine there is no operational data available, the simulation procedure needs extra considerations. These considerations are illustrated in the flow chart of Figure 4. In addition, a sensitivity analysis algorithm is presented later (Figure 12) that follows the simulation framework to evaluate different scenarios in mine truck and shovel system selection and sizing.
The main advantage of this simulation framework in comparison with other research is its comprehensive addressing of the problem of truck and shovel selection. All other available practices try to find solutions to specific parts of the problem, mainly in the form of what-if analysis. For instance, what would be the effect of adding one extra truck to the haulage fleet? Moreover, the framework is capable of addressing both a new and an existing open pit mine operation. This framework can add to the strength of simulation techniques in solving the problem compared to other abovementioned methods, which address the problem only partially.
Although this framework was validated in a large surface mine in this study, for other projects some modifications should be incorporated accordingly. For instance, production planning strategies in a mine with restricted processing plant requirements or ore grade limits dictate more frequent relocations of working faces, compared with a mine with more stable and predictable ore grade fluctuations. These differences introduce frequent changes in haulage distances and, hence, to the simulation approach at hand. Another example is the difference between a small surface mine with more short-term concentrated production plans and a large mine with more strategic and long-term plans. These types of specifications require more or less consideration of some blocks of the framework than others, accordingly (Figure 5).
Case study
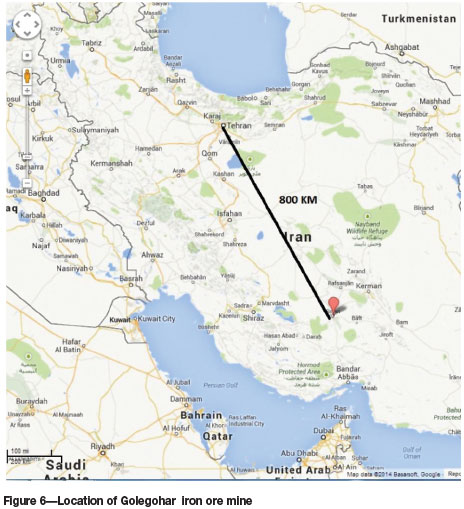
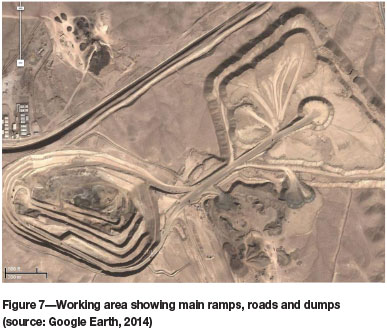
Golegohar iron ore mine is located in southern Iran, 50 km from Sirjan, in the southwest of Kerman Province (latitude 29°7'N and longitude 55°19'E, Figure 6). This iron complex includes six known ore reserves and is one of the largest producers and exporters of iron concentrate in the country. It has a measured and indicated reserve of over 1 100 Mt of ore (Golegohar Iron Ore Complex, 2006). In Golegohar, over 10 Mt of iron concentrate is produced annually, through crushing, dry and wet grinding, and low-intensity magnetic separation (Figure 7).
To test the simulation framework, the operation of the current haulage system at Golegohar was investigated and necessary data collected. After statistical analysis of the raw data and deriving probabilistic distributions for each data-set (Carlsberg, 2011), a DES model was coded in GPSS/H (student version). In the next step, the proposed model was verified and then validated by comparing it with the real mine data by means of statistical tests (e.g. chi square) (Zimmermann, 2008). A series of sensitivity analyses were performed for the purpose of establishing the optimum number of cable shovels and dump trucks required to meet the production targets with the maximum possible system productivity. The simulation model was run with different combinations of the truck and shovel system numbers in a matrix pattern in order to identify the most appropriate system. The major constraint was set to achieve the annual production rate, and the main goal to accomplish the job with a minimum amount of equipment. Different scenarios were tested to find the highest equipment utilization and minimum idle and waiting time in queues. A dispatching system was introduced with the main objective of minimizing shovel idle time and the number of trucks in queues. The most important data acquired in the observation phase included mine production plans and layouts, current fleet geometry and parameters, and time data of the real system. Details of the applied methodology are illustrated in Figure 5.
Observation of the current system
Direct observation of the loading and haulage operations over 150 days, during different shifts and hours, resulted in recognition of the following problems in the current system:
> Truck loading method was single-sided
> On many occasions, only two out of the four cable shovels were operating. The other two were not used, either because of frequent mechanical failures or lack of proper working faces
> Shovels idle times were too long (mostly over 6 minutes). On some occasions, three or more trucks were arriving together (trucks queue)
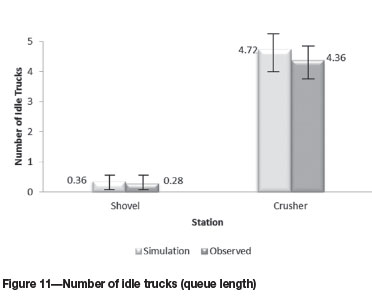
> Almost always, there was a long queue before the primary crusher. The average queue length was four trucks (in random observations) and the average waiting time for each truck was 11.5 minutes
> There was no haulage fleet dispatching system in the mine
> The main bottleneck in the haulage fleet flow was at the primary crusher.
Model construction
After obtaining and analysing all necessary data, the next step was to construct a simulation model by programming in GPSS/H (student version). GPSS/H (General Purpose Simulation System) is both a computer language and a computer program. It was designed for studying systems represented by a series of discrete events. GPSS/H is a low-level, nonprocedural language. GPSS/H was selected as the simulation language as part of this study, for the following reasons:
(i) It is multivendor, so it is continually being upgraded
(ii) It is widely available
(iii) It is written in machine language and, therefore, is inherently very fast
(iv) It can solve a wide variety of problems rapidly and accurately
(v) It has proved to be extremely versatile for modelling mining operations. These include both surface and underground operations, as well as material flow through a smelter, mill, and refinery. It is easily coupled with PROOF for making animations (Sturgul, 2000).
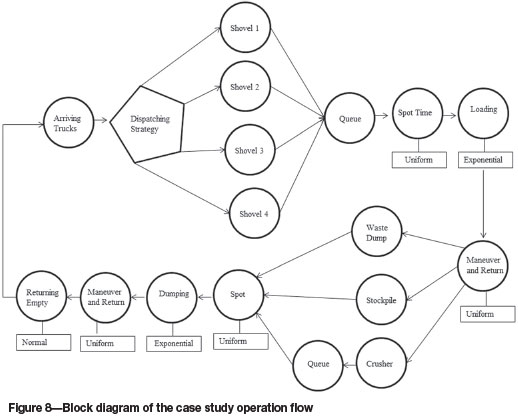
A block diagram of the case study is illustrated in Figure 8.
It should be noted that, due to the application of probability distribution and random numbers in a queue system simulation (Figure 8), and for error reduction purposes, the final model, which consisted of 115 GPSS blocks, was executed with different random data-sets.
Model animation and validation
Some issues can be investigated easily in an animation that would be very hard to catch in the simulation model - like collisions or subtle logic glitches. The ability to see a model in action makes animation a great verification tool for the model
builder (Ståhl et al, 2011; Wolverine Software, 2013; University of Nevada, 2013). An animation model of the case study was executed by importing the GPSS/H model outputs to Proof Animation software. Observation of the animation model for different durations demonstrated that the proposed model logic had been achieved.
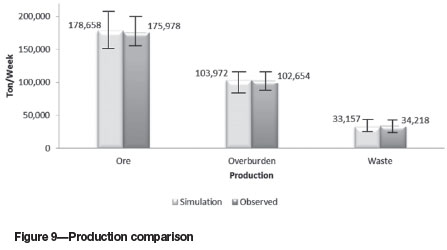
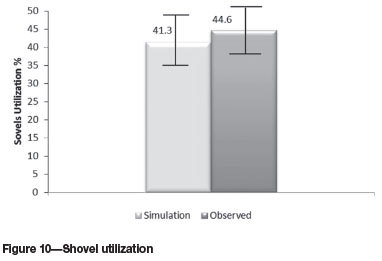
Model validation, as the most important phase of a DES exercise, was performed through comparison of the model outputs with the real system's data by designing statistical tests, e.g. chi-square and Kolmogorov-Smirnov at 5% significance level (Ross, 2006; Zimmermann, 2008). For this purpose, a new set of actual data, separate from the data used in the model, was collected. Three samples of the comparison results are illustrated in Figures 9-11, which were validated through chi-square method at the 5% significance level.
Further processing
A flow chart of the sensitivity analysis is presented in Figure 12. To evaluate the effectiveness of employing an appropriate traffic-dispatching strategy, the current model was modified to take this issue into account. The main goal of the dispatching algorithm was set to assign the incoming trucks first to the idlest shovels. However, many other what-if type questions may be answered by this model with minimum cost, safety issues, and disturbance to the current operation routines e.g. the effect of operators' skills, changes in road grades, the possibility of increasing the primary crusher's capacity, purchasing new trucks to replace some older ones with low mechanical availabilities (Burt et al, 2011), changing the current truck sizes (Bozorgebrahimi, Hall, and Morin, 2005), employing a hybrid haulage fleet, different dispatching strategies (Alarie and Gamache, 2002), feasibility of changing the current system to a conveyor belt system as the depth of the mine increases (Mcnearny and Nie, 2000).
Discussion of the simulation results
To demonstrate the capabilities of simulation in what-if analysis, a sample of the many analyses conducted in this study is discussed below:
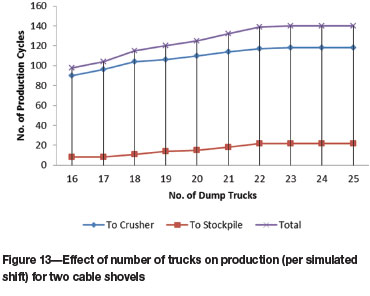
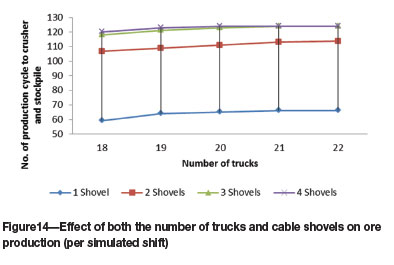
Figure 13 illustrates the effect of the haulage fleet size on the number of production cycles per shift when only two shovels are operating. Increasing the number of dump trucks results in an increase of production rate per shift up to an optimum point. After that, because of the haulage fleet oversize and limited number of shovels (only two in this case), much time will be wasted in different truck queues at shovels. This results in no further increase in production. After this point the extra dump trucks in the system will be put into queues, thus making no contribution to production (Sturgul, 1995). Thus, the maximum production rate with two shovels is achieved with 22 dump trucks. This rate is 9.5 M t/a, which does not meet the minimum production requirements of the mine. At least three shovels are needed. The effect of the number of shovels on production rate is demonstrated in Figure 14. The simulation outputs show that increasing the number of shovels will result in more production with an equal number of trucks. For this range of truck numbers, operation with three and four shovels results in almost the same production rates. This is due to the fact that at least one of the shovels would be idle for most of a shift. Obviously, operating four loaders is not justified. At this point, three cable shovels will be the best choice for the mine's production target.
The effect of the size of both the haulage and the loading fleet on effective shovel working hours is illustrated in Figure 15.
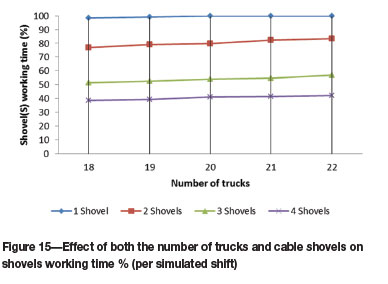
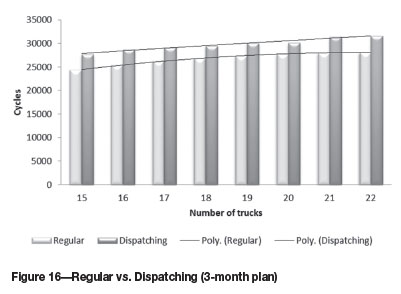
Figure 16 shows the effect of application of a traffic dispatching system on the mine's operation. Regardless of the number of trucks, a proper dispatching strategy increases the productivity of the system.
Summary of the optimal results
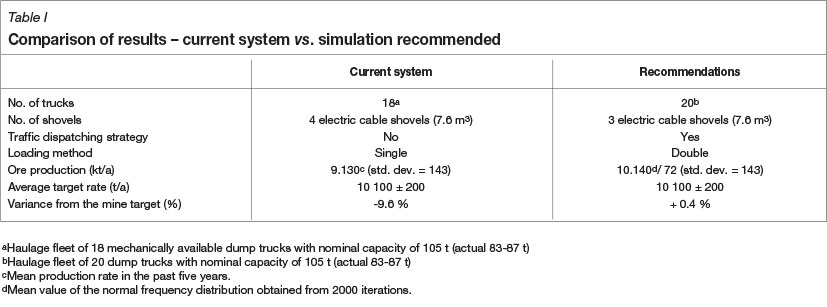
Table I shows that the modifications suggested by the simulation result in a 10% increase in production. Furthermore, using one less cable shovel contributes to increasing the mine profitability by introducing lower operational costs (assuming that the operational cost of one large shovel outweighs the associated costs of operating two additional trucks).
Conclusions
The truck and shovel system is the dominant method of material loading and haulage in open pit mining. Proper selection and sizing of the equipment has considerable effects on a mine's productivity and economics. A critical survey and analysis of the literature showed that deterministic, stochastic, and experimental methodologies for optimizing truck and shovel systems result in considerably different outputs. Thus, designing a comprehensive modelling framework is of high importance in system selection and sizing for mining operations. In addressing this issue, a stochastic simulation framework for truck and shovel system selection and sizing, for both new and existing open pit mines, was proposed. As part of the study, a proper simulation technique (discrete-event system simulation) and language (GPSS/H) were employed. Simulations were validated through real operations at a large open pit mine. The proposed framework is a useful guideline and should be applied accordingly based on the specific characteristics of the particular loading and haulage operation. Consideration of all the effective parameters and their interactions with the system, which are elaborated in the proposed framework, should be the top priority of a mine simulation team. Application of the proposed methodology resulted in considerable improvements in loading and haulage operations at a large open pit mine, with production rate increasing by about 10%.
References
Aghajani, A., Osanloo, M., and Akbarpour, M. 2007. Optimising the loading system of Gol-e-Gohar iron ore mine of Iran by genetic algorithm. Australasian Institute of Mining and Metallurgy Publication Series. Melbourne. pp. 21-215. [ Links ]
Alarie, S. and Gamache, M. 2002. Overview of solution strategies used in truck dispatching systems for open pit mines. International Journal of Surface Mining, Reclamation and Environment, vol. 16, no. 1. pp. 59-76. [ Links ]
Awuah-Offei, K., Temeng, V.A., and Al-Hassan, S. 2003. Predicting equipment requirements using SIMAN, a case study. Mining Technology, vol. 112. pp. A180-A184. [ Links ]
Ayac, Z.Z. 2007. A hybrid approach to machine-tool selection through AHP and simulation. International Journal of Production Research, vol. 45, no. 9. pp. 2029-2050. [ Links ]
Baffi, E.Y. and Ataeepur, M. 1996. Simulation of a truck- shovel system using Arena. Proceeding of the 26th International Symposium on the Application of Computers and Operations Research in the Mineral Industries (APCOM), Pennsylvania, USA. pp. 153-159. [ Links ]
Banks, C.M. 2010. Introduction to modeling and simulation. Modeling and Simulation Fundamentals: Theoretical Underpinnings and Practical Domains. Sokolowski, J.A. and Banks, C.M. (eds.). Wiley, Hoboken, NJ. pp. 1-24. [ Links ]
Bozorgebrahimi, A., Hall, R.A., and Morin, M.A. 2005. Equipment size effects on open pit mining performance. International Journal of Surface Mining, Reclamation and Environment, vol. 19, no. 1. pp. 41-56. [ Links ]
Burt, C., Caccetta, L., Hill, S., and Welgama, P. 2005. Models for mining equipment selection. MODSIM05 - International Congress on Modellingand Simulation: Advances and Applicationsfor Management and Decision Making, University of Melbourne, 12-15 December 2005. Zerger, A. and Argent, R.M. (eds.). pp. 1730-1736. [ Links ]
Burt, C., Caccetta, L., Welgama, P., and Fouché, L. 2011. Equipment selection with heterogeneous fleets for multiple-period schedules. Journal of the Operational Research Society, vol. 62, no. 8. pp. 1498-1509. [ Links ]
Burt, C.N. and Caccetta, L. 2014. Equipment selection for surface mining: a review. Interfaces, vol. 44, no. 2. pp. 143-162. [ Links ]
Camarena, E.A., Gracia, C., and Cabrera Sixto, J.M. 2004. A mixed integer linear programming machinery selection model for multifarm systems. Biosystems Engineering, vol. 87, no. 2. pp. 145-154. [ Links ]
Carlberg, C. 2011. Statistical analysis; Microsoft Excel 2010. Indianapolis,IN. [ Links ]
Carr, J.R. 2003. Simple random number generation. Computers and Geosciences, vol. 29, no. 10. pp. 1269-1275. [ Links ]
Edwards, D.J., Malekzadeh, H., and Yisa, S.B. 2001. A linear programming decision tool for selecting the optimum excavator. Structural Survey, vol. 19, no. 2. pp. 113-120. [ Links ]
Golegohar Iron Ore Complex. 2006. Golegohar production reports. [ Links ]
Haldar, A. and Mahaderan, S. 2000. Probability, Reliability and Statistical Methods in Engineering Design. John Wiley & Sons, New York. pp. 304. [ Links ]
Hollocks, B.W. 2006. Forty years of discrete-event simulation: a personal reflection. Journal of the Operational Research Society, vol. 57, no. 12. pp. 1383-1399. [ Links ]
Komljenovic, D., Paraszczak, J., and Fytas, K. 2004. Optimization of shovel- truck systems using the queuing theory. CIM Bulletin, vol. 97. p. 76. [ Links ]
Krause, A. and Musingwini, C. 2007. Modelling open pit shovel-truck systems using the Machine Repair Model. Journal of the Southern African Institute of Mining and Metallurgy, vol. 107. pp. 469-476. [ Links ]
Maria, A. 1997. Introduction to modeling and simulation. Proceedings of the Winter Simulation Conference Proceedings, Atlanta, GA, 7-10 December 1997. Andraótthir, A., Healy, K.J., Withers, D.H., and Nelson, B.L. (eds.). Association for Computing Machinery, New York. pp. 7-13. [ Links ]
Marzouk, M. and Moselhi, 0. 2003. Constraint-based genetic algorithm for earthmoving fleet selection. Canadian Journal of Civil Engineering, vol. 30, no. 4. pp. 673-683. [ Links ]
Mcnearny, R.L. and Nie, Z. 2000. Simulation of a conveyor belt network at an underground coal mine. Mineral Resources Engineering, vol. 9, no. 3. pp. 343--355. [ Links ]
Nance, R.E. 1995. Simulation programming languages: an abridged history. Proceedings of the 1995 Winter Simulation Conference, Arlington, VA. pp. 1307-1313. [ Links ]
Pidd, M. and Carvalho, A. 2006. Simulation software: not the same yesterday, today or forever. Journal of Simulation, vol. 1, no. 1. pp. 7-20. [ Links ]
Robinson, S. 2005. Discrete-event simulation: from the pioneers to the present, what next? Journal of the Operational Research Society, vol. 56, no. 6. pp. 619-629. [ Links ]
Ross, I., Casten, T., Marsh, D., and Peppin, C. 2010. The role of simulation in ground handling optimization at the Grasberg block cave mine. Hoist and Haul 2010 - Proceedings of the International Conference on Hoisting and Haulage, Las Vegas, 12-17 September 2010. Brokenshire, P. and Andersen, S. (eds.). Society for Mining, Metallurgy & Exploration, Littleton, CO. pp. 257-265. [ Links ]
Ross, S.M. 2006. Statistical Modeling and Decision Science: Simulation. 4th edn. Academic Press, Burlington, MA. [ Links ]
Runciman, N., Vagenas, N., and Newson, G. 1996. Simulation modeling of underground hard - rock mining operations using WITNESS. Proceedings of the 26th International Symposium on the Application of Computers and Operations Research in the Mineral Industries (APCOM), Pennsylvania, USA. pp. 148-151. [ Links ]
Schriber, T.J. 1991. An Introduction to Simulation using GPSS/H. John Wiley & Sons, New York. [ Links ]
Schriber, T.J. 1992. Perspectives on simulation using GPSS. Proceedings of the 24th Conference on Winter Simulation, Arlington, VA, 13-16 December 1992 . ACM Press. pp. 338-342. [ Links ]
Sogaard, H.T. and Sorensen, C.G. 2004. A model for optimal selection of machinery sizes within the farm machinery system. Biosystems Engineering, vol. 89, no. 1. pp. 13-28. [ Links ]
StAhl, I., Henriksen. J., Born, R., and Herper, H. 2011. GPSS 50 years old, but still young. Proceedings of the Winter Simulation Conference, Phoenix, AZ, 11-14 December 2011. Jain, S. Creasey, R.R., Himmelspach, J., White, K.P., and Fu, M. (eds). Institute of Electrical and Electronics Engineers, New York. pp. 3947-3957. [ Links ]
Stout, C.E., Conrad, P.W., Todd, C.S., Rosenthal, S., KnudsenInt, HP. Simulation of a large multiple pit mining operation using GPSS/H. Journal of Mining and Mineral Engineering, 2013, vol. 4, no. 4. pp. 278-295. [ Links ]
Sturgul, J.R. 1992. Using exact statistical distributions for truck shovel simulation studies. International Journal of Surface Mining and Reclamation, vol. 6, no. 3. pp. 137-139. [ Links ]
Sturgul, J.R. 1995. Simulation and animation come of age in mining. Engineering and Mining Journal, vol. 6, no. 2. pp. 38-42. [ Links ]
Sturgul, J.R. 1999. Discrete mine systems simulation in the United States. International Journal of Surface Mining Reclamation and Environment, vol. 13. pp. 37-41. [ Links ]
Sturgul, J.R. 2000. Mine Design Examples Using Simulation. Society of Mining, Metallurgy and Exploration, Littleton, CO. [ Links ].
Sturgul, J.R. and Thurgood, S.R. 1993. Simulation model for materials handling system for surface coal mine. Bulk Solids Handling, vol. 13, no. 4. pp. 817-820. [ Links ]
University of Nevada. 2013. Mine Systems Optimization and Simulation Laboratory. Mining and Metallurgical Engineering Department, University of Nevada, Reno. http://www.unr.edu/mining/research/mine-systems-optimization-and-simulation [ Links ]
Wolverine Software. 2013. http://www.wolverinesoftware.com. [ Links ]
Zimmermann, A. 2008. Stochastic Discrete Event Systems: Modeling, Evaluation, Applications. Springer. [ Links ]
Paper received Jul. 2014
Revised paper received Feb. 2015.
The basic steps of the proposed simulation program are summarized here to familiarize readers with the underlying process. Readers might follow the procedure to simulate their own mining operations. However, detailed application of the proposed simulation framework is recommended for a more comprehensive practice.
Step 1
All loading units should be monitored carefully during different operating conditions. Necessary loading cycle times are measured during this phase. Table A.1 shows a sample of data collected in this case study.
Step 2
All haulage cycle times for all dump trucks should be collected. Loading and dumping stations, as well as, the number of idle trucks in queues, are required data in this phase. (Table A.2).
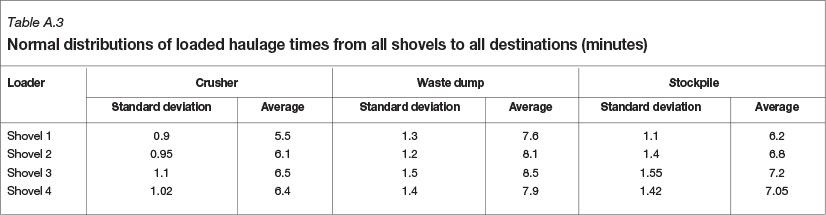
Data statistical analysis Step 3
The raw data obtained in the previous two phases should be analysed to derive statistical information. Probability distribution functions (PDFs) are required data for Monte Carlo stochastic sampling (Burt et al., 2011) and discrete-event simulation by GPSS/H (Bozorgebrahimi, Hall, and Morin, 2005) (Table A.3).
Step 4
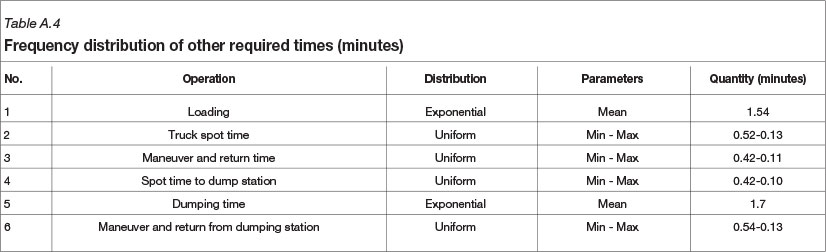
All the PDFs in Table A.4 are needed along with Step 3, as the minimum requirements of the simulation program.
Step 5
Finally, a simulation program should be coded. A block diagram of the program is illustrated in Figure 8. For a very good source of GPSS/H programming see Sturgul (1995).
Step 6
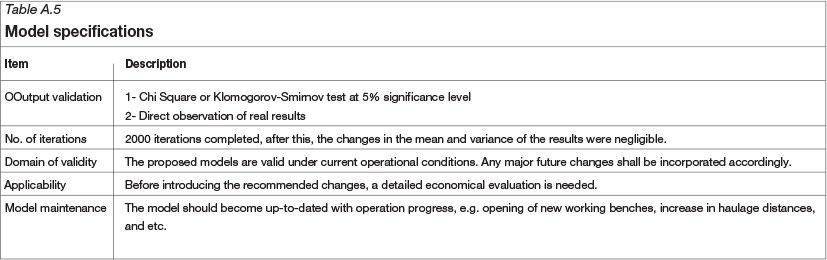
Based on the simulation purposes, relevant sensitivity analysis might be executed (see Figure 12). Some important specifications of the introduced model of the case study are summarized in Table A.5.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}