










Serviços Personalizados
Artigo
 Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
Indicadores

Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkSouth African Journal of Industrial Engineering
versão On-line ISSN 2224-7890
versão impressa ISSN 1012-277X
S. Afr. J. Ind. Eng. vol.24 no.1 Pretoria Jan. 2013
Automatic target recognition on land using three dimensional (3D) laser radar and artificial neural networks
K. Göztepe
War Colleges Command, Army War College, Dept. of Combat Tactics, Yenilevent-34330, Istanbul, Turkey. kerimgoztepe@yahoo.com
ABSTRACT
During combat, measuring the dimensions of targets is extremely important for knowing when to fire on the enemy. The importance of identifying a known target on land emphasizes the importance of techniques devoted to automatic target recognition. Although a number of object-recognition techniques have been developed in the past, none of them have provided the desired specifics for unidentified target recognition. Studies on target recognition are largely based on images that assume that images of a known target can be readily viewed under any circumstance. But this is not true for military operations conducted on various terrains under specific circumstances. Usually it is not possible to capture images of unidentified objects because of weather, inadequate equipment, or concealment. In this study, a new approach that integrates neural networks and laser radar has been developed for automatic target recognition in order to reduce the above-mentioned problems. Unlike current studies, the proposed model uses the geometric dimensions of unidentified targets in order to detect and recognise them under severe weather conditions.
OPSOMMING
Die bepaling van teikenafmetings is van besondere belanggedurende gevegte sodat vuurtydstipte sodoende vasgelê kan word. In hierdie opsig word outomatiese uitkenning van teikentipe dus ook belangrik. Laasgenoemde tegnieke het desnieteenstaande nie besonder presteer met die uitkenning van vreemdeteikentipes nie. Terreintoestande, weers-omstandighede, swak waarnemingstoerusting en kamoeflering speel in die verband ook 'n rol. Nuwerwetse toerusting wat gebruikmaak van neurale netwerke laserradar word voorgehou as 'n oplossing vir die vraagstuk onder uiteenlopende omgewingstoestande.
1. INTRODUCTION
Accurate diagnosis and identification of targets in a theatre of operations is an essential strategy for contemporary armies in order to minimise casualties and increase military intelligence. The purpose of this process is to see whether there is an object that requires attention - a potential target - and then to recognise what is detected (e.g. a tank, dismounted soldiers, a self-propelled howitzer). And finally, it must be determined whether the potential target is enemy or friend (who/what unit/vehicle of what formation is in sight?). An automatic target recognition (ATR) with a neural network has the potential to facilitate this process.
Texture analysis researchers have for many years attempted to model the basic components of the human visual system to capture our visual abilities. Successful implementation of the automatic target identification task involves automatic detection, classification, and tracking of a target that has known dimensions. Target identification using a laser device is a new facility that can be implemented as a 3D structure, and is similar to image processing. Military engineers concerned with the identification of known targets and objects in the field have produced a new paradigm: quick recognition of a target with lasers. The laser system aims to minimise friendly casualties by the rapid identification of known targets. While the laser system does not propose full recognition of known targets in the battlefield, the system seeks to prevent friendly casualties that result from sudden and unexpected contacts. Primarily, the system continuously searches for unnamed objects in the theatre around areas where an enemy threat is expected.
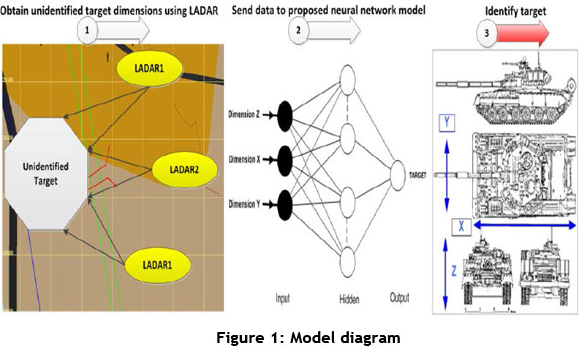
This paper discusses a new laser-based target identification system that was developed using neural networks. A LADAR device is sufficient for measuring the dimensions (width, length, height) of an unidentified object, but several devices offer more effective results. The concept of target recognition by a laser mechanism was based on the fact that the objects have dimensions of different sizes. A multilayer perceptron neural network (MLP) was produced according to this concept. The project in this paper demonstrated that it was possible to identify land targets using 3D laser devices and neural networks, because this system has the ability to detect and recognise targets even under severe weather conditions or inappropriate recognition situations.
The paper is organised as follows. Section 2 illustrates related literature and describes the proposed research method in relation to the artificial neural network considered for this study. Section 3 describes the dimensional measurement system using LADAR. Section 4 discusses the process of implementing neural network with the proposed model. The conclusion is presented in Section 5.
2. LITERATURE REVIEW
Automatic target recognition (ATR) is one of the most challenging problems of the defence industry. The aim of an ATR system is to remove the role of humans from the process of target detection and recognition, and thus to implement a real-time and reliable system of high performance [1].
In the literature, many studies employed neural networks for target recognition. Huntsberger and Jawerth [2,3] proposed a wavelet-based technique for automatic target detection and recognition for acoustic and non-acoustic antisubmarine warfare. Pasquariello and his colleagues' study [4] proposed a modular system based on a neural network for the quasi real-time detection of moving targets in seaport radar images. The Hopfield neural network, which represents a single, robust, and effective method [5], was applied in a target identification study; results suggest that it is a practical tool for identifying land cover targets from remotely-sensed imagery at the subpixel scale. Cozien et al. [6] established a multi neural networks system named 'Jarod', whose task was to determine the shapes detected by agents.
A study by Araghi et al. [7] proposed a vessel identification system based on the covariance of discrete wavelets using probability neural networks. In their study, a set of ship profiles was used to create a covariance matrix with a discrete wavelet transformer using a neural network. Gill and Sohal [8] worked on the performance of a probabilistic neural network and multilayer perceptron for battlefield management and forecasting.
A modular neural network classifier was developed for the problem of automatic target recognition using dynamic infrared (FLIR) imagery by Wang et al. [9]. The classifier consisted of several solo trained neural networks, and a comprehensive number of real FLIR images were employed for their experiments in their model. In another study, Wang et al. [10] worked on complex classifiers that were constructed by combining a number of component classifiers, designed and evaluated in terms of automatic target recognition (ATR), using forward-looking infrared (FLIR) imagery. Steven et al. [11] also studied concepts associated with the processing of military data to detect and recognise targets (ATR). This study was based on military data, but it can only be considered a reliable principle when the proposed systems are field-tested and proven 'under fire'.
Neural networks and other techniques related to ATR were used and compared in Bayik's research [12]. Wang et al. [13] worked on human identification at a distance. Gait recognition used in this study aimed essentially to identify people based on the way they walk. Zhao et al. [14] studied an unidentified face recognition method based on multi-features using a neural networks committee (NNC) machine. Park et al. [15] worked on a target classification system that was applied to a neural network. A 24 GHz microwave radar sensor was used for this study - the active safety system. Heinrichs et al. [16] and Ratches et al. [17] studied automatic target recognition using radar range imagery.
Three dimensional (3D) laser radar produces range images that provide comprehensive 3D information about a target. Today's technology has developed the laser scanner tools that make it possible to obtain high-resolution 3D imaging. In the study of Song et al. [18], a new 3D target recognition algorithm using a single image was proposed. The application was based on geometrically invariant relationships. A pose-independent automatic target detection and recognition system, which used data from an airborne 3D imaging LADAR sensor, was presented by Vasile et al. [19]. This automatic target recognition system uses geometric shape and size signatures from a target model to detect and recognise a target amid extensive terrain scenarios. Mostafa et al. [20] worked on an automatic target recognition system based on three-dimensional reconstruction of the target from an image sequence. Yoo et al. [21] studied an automatic welding of the 3D seam. In their paper, a neural network with 2-D image data was developed and tested in order to get the pattern type. Li et al. [22] discussed in detail the general principle of laser scanning through glass in their study.
3. RESEARCH OBJECTIVE AND METHODOLOGY
The objective of this study is to determine known combat targets using LADAR and neural network integration in order to reduce friendly casualties. A new approach using target geometric dimensions to identify time-critical military targets is considered in this paper. A new neural network target detection application that also performs satisfactorily in self-training mode is proposed, .
3.1 Artificial neural network
Artificial neural networks (ANNs) are used in this study. ANNs are systems constructed to make use of organisational principles resembling those of the human brain [23]. The ANN approach can also be suitably employed to depict expert-level decisions by mimicking the parallel structure of the human brain [24]. It is possible to argue that ANNs represent the promising new generation of information processing systems.
ANNs are composed of many parallel working neurons to solve classification problems. Neurons work by processing information. They both receive and provide information [25]. A neuron is characterised by a state of activation that belongs in the range 0 (false) to 1 (true). ANN achieve their processing capacity by connecting these simple neurons to other neurons with associated weights. The weight determines the structure of the signal that is transmitted from one neuron to another. The weight is updated by learning to alter various inter-connections and thus leads to a modification in the strength of inter-connections. The aim of the ANNs is to transform the inputs into meaningful outputs. The ANNs are trained with the available data samples to investigate the relationship between input and output.
3.1.1 Backpropagation
Backpropagation is a common supervised learning algorithm in the neural network domain [26]. The backpropagation algorithm has a topology that is a fully connected, layered, and feed-forward network. The network consists of an input layer, a hidden layer, and an output layer [27]. A network can have different numbers of neurons in different layers. Each neuron in the input layer is fully connected in the forward direction to all the neurons in the hidden layer through a set of weights. Similarly, each neuron in the hidden layer is fully connected in the forward direction to all the neurons in the output layer through another set of weights [28].
The learning procedure finds a set of weights of the network according to the training input/output patterns so that, given each input pattern, the output produced by the network is sufficiently close to the desired output pattern. The backpropagation algorithm is designed to minimise the mean square error between the computed output of the network and the desired output; the detailed description of the learning rules of the algorithm can be found in the works of Rumelhart et al. [29], Kung [30], and Lek and Guegan [31].
In this study, a backpropagation-based multilayer perceptron (MLP) network was used.
Because of its ability to generalise successfully on a variety of problems, backpropagation is the most common algorithm in training neural networks. Basic steps of backpropagation are given below:
Step 1: Design the structure of the neural network and determine the parameters of the model.
Step 2: Prepare input and output values taken from laser devices and model training.
Step 3: Input training data matrix X and output matrix T.
Step 4: Compute the output vector of each neural unit.
Compute the output vector Y of the output layer.

Compute the output vector H of the hidden layer.

Step 5: Compute the distances d. Compute the distances d of the output layer.

Compute the distances d of the hidden layer.

Step 6: Compute the modification of W and θ (η is the learning rate). (a) Compute the modification of W and θ of the output layer.

(b) Compute the modification of W and θ of the hidden layer.

Step 7: Renew W and θ.
(a) Renew W and θ of the output layer.
![]()
(b) Renew W and θ of the hidden layer.
![]()
Step 8: Repeat step 3 to step 7 until convergence.
3.2 Measuring target dimensions
Measuring the dimensions of a known target in the battlefield during an engagement is particularly crucial for deciding whether or not to shoot. The ability of LADAR has led to the rapid development of laser scanner-based systems for a wide range of applications such as the modelling of architecture [32], forests [33], and engineering structures [34].
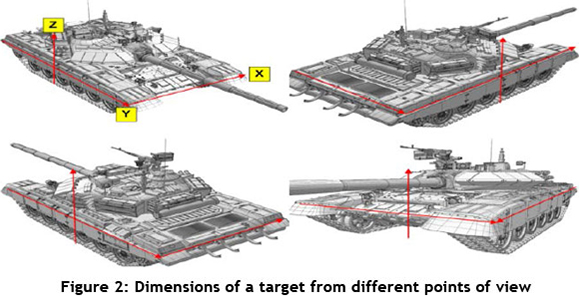
In this study, the dimensional measurement system using LADAR was composed of three commercial LADARs and a personal computer on which the commercial LADAR software runs. The system does not work properly if the distance between the target and the laser device is more than 1,100 meters because of current LADAR technology. On the other hand, laser range finders or ground radars can determine the position of nearby targets quite accurately, and they continue to operate under varying conditions of weather, terrain, or time. The LADARs were placed in the field between 110 and 1,200 meters away from the proposed target and positioned to have the best coverage of the area. The LADARs were mounted on solid, durable, and compact tripods so that they could be repositioned according to military requirements relevant to the terrain. The suitable positions of the three LADARs that maximised the views of potential targets (Figure 2) were determined according to the geographical structure of the land.
4. THE PROPOSED MODEL: EMPLOYING DIMENSIONS WITH NEURAL NETWORKS FOR TARGET IDENTIFICATION
The work in this paper demonstrates that it is possible to help identify targets in the battlefield using target dimensions and ANNs. We attempted to develop a clear and effective method for target identification using neural networks. The laser measuring method was applied to determine the dimensions of the target, and input for the applied ANN model was produced. The overview of the proposed method is shown in Figure 3. The concept of the easy target recognition model is explained below:
Step 1: Detection of known targets
Step 2: Identification of targets
Step 3: Measuring dimensions of known targets
Step 4: Identification of the object using a neural network
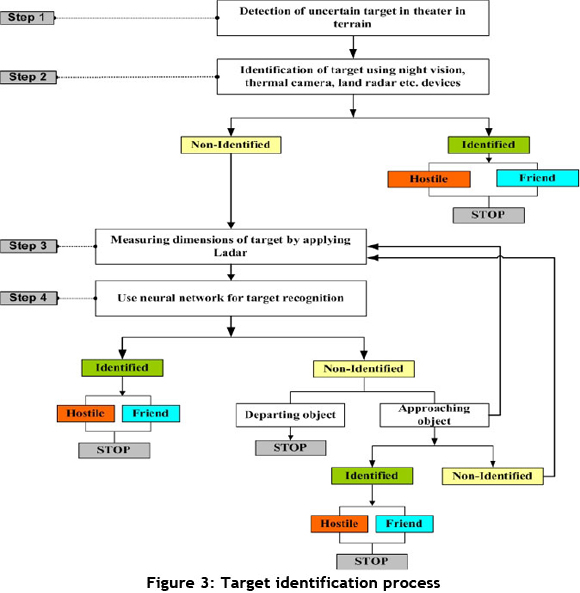
The first step serves to detect and track objects on land. The second step aims to identify the known object with current battlefield recognition devices, thermal Infra Red IR, night vision, radar, etc. However, severe weather conditions, unsuitable terrain, low visibility at night, and other difficulties - including visibility obscurations by the enemy - dramatically affect the target recognition performance of these devices in the battlefield. If the target remains unidentified or suspected, the LADAR is used to obtain its dimensions. Measuring dimensions of an approaching target must be a continuous process, due to current LADAR limitations.
4.1 Step 1: Detection of known targets
Target detection and tracking are the initial steps to start neural network analysis. A target can be detected on the battlefield in a given terrain using smart sensors from far away. The key assumption here is that laser devices are available in the field and are ready to scan when an unidentified object is detected.
4.2 Step 2: Identification of targets
Current target detection and tracking systems are not sufficient for a military unit. It is not easy to identify a detected target in the chaotic and complicated environment of the battlefield. The results received from these systems can mislead a unit and cause friendly casualties if identification of a target fails. Known targets should be observed closely until the target is fully identified with sensors available on the battlefield. If the target is identified as friendly, the recognition process will be stopped.
4.3 Step 3: Measuring dimensions of known targets
One of the main objectives of the proposed approach is to overcome the disadvantages of the current combat target recognition systems and to improve the speed of identification. The system was able to perform target recognition more safely and efficiently for combat units, since it used three laser radars positioned at an adequate distance from the front line (Figure 4).
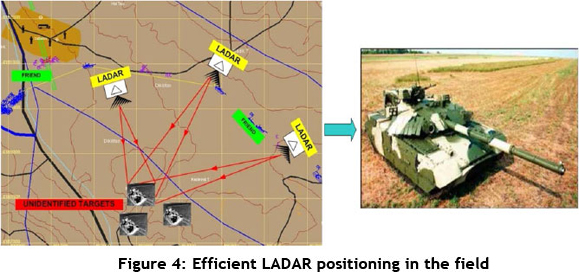
In this step, the target, which is processed but not fully identified by combat recognition devices, is transferred to the laser unit by wired communication line. Laser systems positioned on the battlefield then begin to obtain target dimensions. Receiving dimension data from multiple lasers positioned at different locations produces easy-to-calculate, accurate dimensions of the target. Although one laser system was enough, three lasers were employed in this study. LADARs obtain dimensions of the target as x-y-z and provide them to the proposed neural network as input. In order to obtain more accurate dimensional data of the target, each LADAR should be positioned at a 40°-60° angle on the ground.
4.4 Step 4: Identification of the object using a neural network
The general structure of the problem in this study was considered to be a target identification prediction task, which was ideally suited to the application of neural networks. The key issues in developing the neural network based on the methodology for LADARs' target recognition using dimensions on land are presented in the following stages:
- Receipt of a target's dimension data
- Generation of neural network topology
- Representation of the input and output decision variables
- Training and validation of the neural network
- Testing of the model
4.4.1 Receipt of target's dimension data
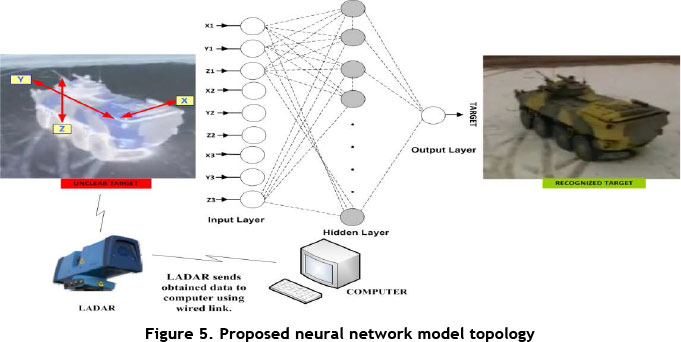
Three laser radars were used to detect known target dimensions in the proposed model. Obtaining accurate target dimension data is critical at this stage. The dimension data was used as input for the neural network to identify the known target. Data obtained from targets was transferred to computer by wired link (Figure 5).
4.4.2 Generation of neural network topology
The topology of the proposed neural network model developed for this study, which uses feed forward backpropagation, is shown in Figure 5. The model consists of the input layer of neuronal nodes to represent the input decision variables, the output layer of neuronal nodes to represent the output decision variables, and one hidden layer of neuronal nodes. A detailed report on the presentation of the input and output decision variables will be provided in the following section.
4.4.3 Representation of the input and output decision variables
Input and output selection is always a complex task for the neural network model developer, as there is no formal method for selecting variables for a model. Furthermore, both under- and over-specification of input variables can often generate poor performance from the neural network model. If there are too many input variables, it can result in poor generalisation. On the other hand, if the lack of information represents critical decision criteria assigned to the model, then it is not possible to develop a correct and accurate model.
The input decision variables for the target recognition problem were of the dimensional feature type. The dimensional feature type, represented by integer values usually varying from 55 to 1,245 cm, denoted the three dimensions and their attributes represented by their respective numerical values, such as width, length, and height expressed in cm. The measurement values of these variables constituted the representation of the input to the network. For example, dimensions for a heavy military multi-purpose truck are provided as 233 cm in width, 230 cm in height, and 780 cm in length (A9 in Table 1). The output layer of the network was designed so that the LADAR operator was provided with the desired information about the target. Model output produced a value defining the target. 'Weights' were assigned a value between 0 and 1 for every target in this study.
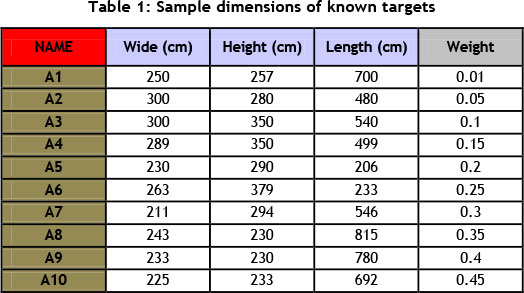
A sample list of today's known military targets used in this paper is given below. Targets have been defined using a code name that can be seen in the 'Name' column. Data related to a target such as width, height, and length are also provided in Table 1.
4.4.4 Training and validation of the neural network
The next step, after defining input and output values, is to determine the training method to be employed that is most appropriate to the problem. The literature reveals that the learning method can be divided into two distinct categories: unsupervised learning and supervised learning. Both require a collection of training examples that enable the neural network to acquire the data set and to produce accurate output values [23].
The supervised learning method was adopted, and the standard backpropagation algorithm was preferred for the proposed model. The design of the hidden layer can be diverse according to the preferred learning algorithm. Barnard and Wessels [35] emphasised that an increment of the number of hidden unit layers results in a trade-off between smoothness and closeness-of-fit. There are several studies in the literature on how to decide upon the hidden node structure [36,37,38].
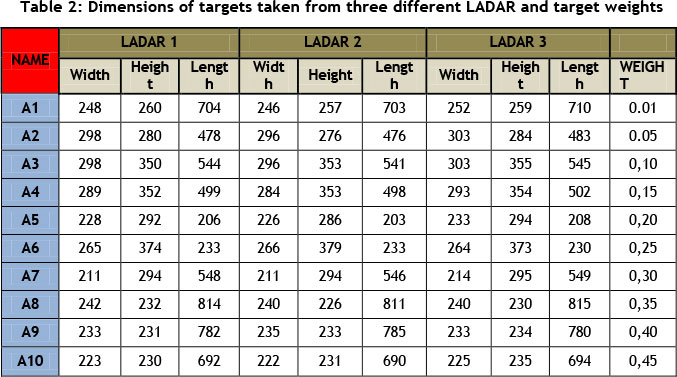
Data obtained from three different LADAR devices were used for the training process. The dimensions described above - width, height, and length values - were used as input, and defined values for targets, named 'Weights', were used as output for neural network training (Table 2).
The general strategy adopted to determine the optimal parameters of the neural network controlling the training process is as follows. Many trials were executed, and for each trial, the number of hidden layer nodes, random initial weights, and biases of the neural network were varied. The neural network was trained using different combinations of momentum values in an attempt to identify the neural network that performs best on the testing data.
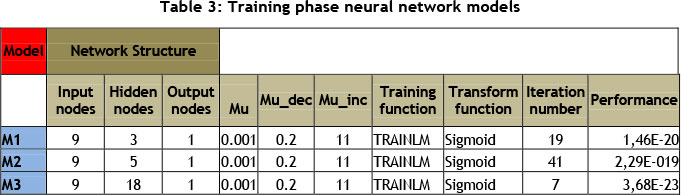
TRAINLM - a network training function - that updates weight and bias values according to the Levenberg-Marquardt optimisation was employed in the proposed model. The sigmoid function was preferred as an activation function. The sigmoid transfer function was chosen because of its ability to facilitate the generalisation of learning characteristics to yield models with improved accuracy. During the network training phase, three different models were constructed in order to obtain the best neural network structure. Performance results of the training processes are shown in Figure 6.
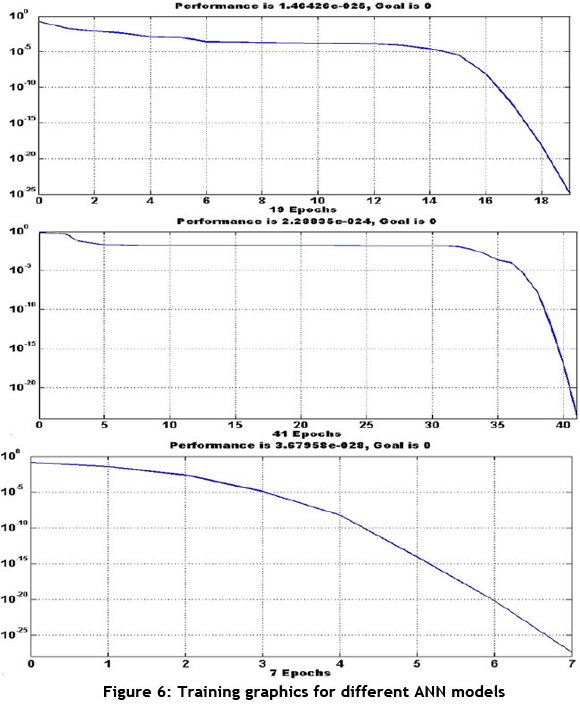
Three methods for the process of selecting hidden nodes were executed in the construction of the neural network [39].
- Model 1 (M1): Eight hidden nodes = (the number of input nodes x number of output nodes)1/2 ;
- Model 2 (M2): Eleven hidden nodes = 1/2 (the number of input nodes + the number of output nodes);
- Model 3 (M3): Thirty-four hidden nodes = 2(the number of input nodes) Detailed structure information about the neural network models is given in Table 3.
As it delivered the best performance, model M3 was selected after training for automatic target recognition.
4.4.5 Testing the proposed neural network model
Test data that had not been used as input to the trained network were used to test the network performance. Forty-eight weight data were used for testing the network. During the testing phase, weight changing was not allowed. The outputs were obtained in a feed forward method, after which they were compared with the real targets. Finally, target detection ability was calculated by analysing the information derived from LADAR devices in order to predict how well the proposed system accomplished its objective.
5. CONCLUSION
A neural network model was developed with a fully-automated target detection and recognition system that employed the target dimensions provided in this study. The LADAR neural network system has the ability to detect and recognise targets even under severe weather conditions or inappropriate recognition situations. It was proved that detection and recognition of a known target was feasible, using data collected in the field with LADARs. The model was able to produce accurate target information for military purposes, and demonstrated a high level recognition performance on moving targets.
The system can have significant practical value for the human operator of target recognition under difficult battlefield conditions. Recognition of a known target plays a vital role for a military unit. The goals of improving the speed of the identification process and decreasing friendly casualties for the moving units were achieved in this study.
The proposed model has several advantages over other target recognition studies:
a) Many studies in the literature use image-oriented systems. This study, however, focused on target dimensions and neural network integration.
b) It is easy to implement the model with LADAR devices in the field.
c) Most target recognition systems need a clear image of the targets. For the proposed model, there is no need for the colour and texture of a target. The model requires only the dimensions of a known target.
d) Experimental results demonstrated that the model is relatively low-cost in the long term, compared with other target recognition systems. Many recognition systems need advanced technology and an experienced technician for continuous recognition process. The proposed model can solve these problems with LADAR and an operator.
A new target recognition application, based on target geometrics dimensions that will combine the LADAR and artificial neural network technique, is also proposed. The process of template formation and the identification procedure in the case of unidentifiable objects is described in detail. The effectiveness of the neural network in identifying targets using target geometrics is also described. It has been shown that this technique, which corresponds to target dimensions, can be highly effective in correct decision-making on the ground.
This paper includes details of how neural networks are created for target recognition. For a large number of different target classes with a significantly large number of templates, considerable neural network learning processing may be necessary for accurate identification.
ACKNOWLEDGEMENTS
The author thanks Emin Güven and Bünyamin Tuner for their valuable suggestions and remarks.
REFERENCES
[1] Brown, W.M. & Swonger, C.W. 1989. A prospectus for automatic target recognition, IEEE Transactions on Aerospace and Electronic Systems, 25(3), pp.411 -414. [ Links ]
[2] Huntsberger, T.L. & Jawerth, B.D. 1998. Wavelet based automatic target detection and recognition, Annual Tech. Rep., University Research Initiative Program for Combat Readiness, University of South Carolina, Columbia, SC, USA. [ Links ]
[3] Huntsberger, T.L. & Jawerth, B.D. 1998. Wavelet based algorithms for acoustic and non- acoustic antisubmarine warfare, Annual Tech. Rep., University Research Initiative Program for Combat Readiness, University of South Carolina, Columbia, SC, USA. [ Links ]
[4] Pasquariello, G., Satalino, G., la Forgia, V. & Spilotros, F. 1998. Automatic target recognition for naval traffic control using neural networks, Image and Vision Computing, 16, pp. 67-73. [ Links ]
[5] Tatem, A.J., Lewis, H.G., Atkinson, P.M. & Nixon, M.S. 2001. Super-resolution target identification from remotely sensed images using a Hopfield neural network, IEEE Transactions on Geoscience and Remote Sensing, 39(4), pp.781-796 [ Links ]
[6] Cozien, R., Rosenberger, C., Eyherabide, P., Rossettini, J. & Ceyrolle, A. 2000. Target detection and identification using neural networks and multi-agents systems, Information Fusion, 2000. FUSION 2000. Proceedings of the Third International Conference, page(s): MOD1/10 - MOD1/17; Vol.1, 10-13 July. [ Links ]
[7] Araghi, L.F., Khaloozade, H. & Arvan, M.R. 2009. Ship identification using probabilistic neural networks (PNN), Proceedings of the International Multi Conference of Engineers and Computer Scientists, Vol II, pp. 18-20. [ Links ].
[8] Gill, G.S. & Sohal, J.S. 2008. Battlefield decision making: A neural network approach, Journal of Theoretical and Applied Information Technology, 4(8), pp. 697-699. [ Links ]
[9] Wang, L-C., Der, S.Z. & Nasrabadi, N.M. 1998. Automatic target recognition using a feature- decomposition and data-decomposition modular neural network, IEEE Transactions on Image Processing, 7 (8), pp. 1113-1121. [ Links ]
[10] Wang, L-C., Der, S.Z. & Nasrabadi, N.M. 1998. Automatic target recognition using neural networks, Algorithms, devices, and systems for optical information processing II, Proc. SPIE, 3466, pp. 278-289. [ Links ]
[11] Steven, K.R., John, M.C. & Curtis, E. 1995. Neural networks for automatic target recognition, Neural Networks, 8(7-8), pp. 1153-1184. [ Links ]
[12] Bayik, T.M. 2004. Automatic target recognition in infrared imagery, Thesis submitted to the Graduate School of Natural and Applied Sciences of Middle East Technical University, Turkey. [ Links ]
[13] Wang, L., Tan, T., Ning, H. & Hu, W. 2003. Silhouette analysis-based gait recognition for human identification, IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(12), pp. 1505-1518. [ Links ]
[14] Zhao, Z-Q., Huang, D-S. & Sun, B-Y. 2004. Human face recognition based on multi-features using neural networks committee, Pattern Recognition Letters, 25, pp. 1351-1358. [ Links ]
[15] Park, S., Hwang, J.P., Kim, E., Lee, H. & Jung, H.G. 2010. A neural network approach to target classification for active safety system using microwave radar, Expert Systems with Applications, 37, pp. 2340-2346. [ Links ]
[16] Heinrichs, R.M., Aull, B.F., Marino, R.M., Fouche, D.G., McIntosh, A.F., Zayhowski, J.J., Stephens, T., O'Brien, M.E. & Albota, M.A. 2001. Three-dimensional laser radar with APD arrays, SPIE 4377, pp. 106-117. [ Links ]
[17] Ratches, J.A., Walters, C.P., Buser, R.G. & Guenther, B.D. 1991. Aided and automatic target recognition based upon sensory inputs from image forming systems, IEEE Trans. Patt. Anal. Mach. Intell. 19(9), pp. 1004-1019. [ Links ]
[18] Song, S.B., Lee, K.M., Lee, S.U. & Yun, I.D. 2003. 3D target recognition based on projective invariant relationships, J. Visual Communication and Image Representation, 14, pp. 1-21. [ Links ]
[19] Vasile, A.N. & Marino, M.R. 2005. Pose-independent automatic target detection and recognition using 3D laser radar imagery, Lincoln Laboratory Journal, 15(1), pp. 61-78. [ Links ]
[20] Mostafa, M.G., Hemayed, E.E. & Farag, A.A. 1999. Target recognition via 3D object reconstruction from image sequence and contour matching, Pattern Recognition Letters, 20, pp. 1381-1387. [ Links ]
[21] Yoo, W.S. & Na, S.J. 2003. Determination of 3-D weld seams in ship blocks using a laser vision sensor and a neural network, Journal of Manufacturing Systems, 22(4), pp. 340-347. [ Links ]
[22] Li, Z., Chang, C-C., Dempsey, P.G. & Cai, X. 2008. Refraction effect analysis of using a handheld laser scanner with glass support for 3D anthropometric measurement of the hand: A theoretical study, Measurement, 41, pp. 851-861. [ Links ]
[23] Haykin, S. 1994. Neural networks: A comprehensive foundation, New York: Macmillan College Publishing Company, ISBN 0-02-352761-7. [ Links ]
[24] Huin, S.F., Luong, L.H.S. & Abhary, K. 2003. Knowledge-based tool for planning of enterprise resources in ASEAN SMEs, Robotics and Computer Integrated Manufacturing, 19, pp. 409-414. [ Links ]
[25] Ibrahim, N.K., Raja Abdullah, R.S.A. & Saripan, M.I. 2009. Artificial neural network approach in radar target classification, Journal of Computer Science, 5(1), pp. 23-32. [ Links ]
[26] Wasserman, P.D. 1989. Neural computing - Theory and practice, Van Nostrand Reinhold, New York. [ Links ]
[27] Rich, E. & Knight, K. 1997 Artificial intelligence. McGraw-Hill, New York. [ Links ]
[28] Gupta, A. & Lam, M.S. 1996. Estimating missing values using neural networks, The Journal of the Operational Research Society, 47(2), pp. 229-238 [ Links ]
[29] Rumelhart, D.E., Hinton, G.E. & Williams, R.J. 1986. Learning internal representations by error propagation. In Rumelhart, D.E., McClelland, J.L., and the PDP Research Group (eds), Parallel distributed processing. Explorations in the microstructure of cognition. Volume 1: Foundations, MIT Press, Cambridge, MA, pp. 318-362. [ Links ]
[30] Kung, S.Y. 1993. Digital neural networks. Prentice Hall, Eaglewood Cliffs, New Jersey. [ Links ]
[31] Lek, S. & Guegan, J.F. 2000. Artificial neuronal networks: Application to ecology and evolution.Springer, Berlin. [ Links ]
[32] Xiao, Y., Zhan, Q. & Pang, Q. 2007. Laser scanning for protection of historical buildings, International Conference on Wireless Communications, Networking and Mobile Computing, pp. 5971-5974. [ Links ]
[33] Danson, F.M., Hetherington, D., Morsdorf, F. & Allgöwer, B. 2007. Forest canopy gap fraction from terrestrial laser scanning, IEEE Geoscience and Remote Sensing Letters, 4(1), pp. 157-160. [ Links ]
[34] Biskup, K., Arias, P., Lorenzo, H. & Armesto, J. 2007. Application of terrestrial laser scanning for shipbuilding, Proceedings of IAPRS Workshop on laser scanning 2007 and SilviLaser 2007, XXXVI(3), pp. 56-61. [ Links ]
[35] Barnard, E. & Wessels, L. 1992. Extrapolation and interpolation in neural network classifiers. IEEE Control Systems, 12(5), pp. 50-53. [ Links ]
[36] Patuwo, E., Hu, M.Y. & Hung, M.S. 1993. Two-group classification using neural networks, Decision Sciences, 26(6), pp. 749-779. [ Links ]
[37] Lenard, M.J., Alam, P. & Madey, G.R. 1995. The application of neural networks and a qualitative response model to the auditor's going concern uncertainty decision, Decision Sciences, 26(2), pp. 209-227. [ Links ]
[38] Piramuthu, S., Shaw, M. & Gentry, J. 1994. A classification approach using multi-layered neural networks, Decision Support Systems, 11(5), pp. 509-525. [ Links ]
[39] Kuo, R.J., Chi, S.C. & Kao, S.S. 2002. A decision support system for selecting convenience store location through integration of fuzzy AHP and artificial neural network, Computers in Industry, pp. 199-214. [ Links ]


{kind=link}
{kind=link}
{kind=link}