










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkSouth African Journal of Industrial Engineering
On-line version ISSN 2224-7890
Print version ISSN 1012-277X
S. Afr. J. Ind. Eng. vol.23 n.1 Pretoria Jan. 2012
GENERAL ARTICLES
Micro-material handling, employing e-beam coatings of copper and silver
S. MatopeI, *; A.F. van der MerweII; Y.I. RabinovichIII
IDepartment of Industrial Engineering Stellenbosch University, South Africa. smatope@sun.ac.za
IIDepartment of Industrial Engineering Stellenbosch University, South Africa. andrevdm@sun.ac.za
IIIParticulate Department Florida University, United States of America. yrabinovich@perc.ufl.edu
ABSTRACT
Van der Waals forces and other adhesive forces impose great challenges on micro-material handling. Mechanical grippers fail to release micro-parts reliably because of them. This paper explores how the problematic Van der Waals forces may be used for micro-material handling purposes using surface roughnesses generated by e-beam coatings of copper and silver on silicon. An atomic force microscope, model Asylum MFP 3 D-Bio with version 6.22A software, was used to measure the forces exerted by the surfaces. A silver coating of 1.41 nm rms surface roughness value is found to exert the highest Van der Waals force, followed by a copper coating of 2.72 nm rms; a copper coating of 217 nm rms exerts the least force. This implies that, in a reliable micro-material handling system, these coatings are suitable for the interactive surfaces of the placement position, micro-gripper, and the pick-up position respectively.
OPSOMMING
Van der Waalskragte en ander bindingskragte hou steeds groot uitdagings in vir mikro-materiaalhantering. As gevolg van hierdie bindingskragte stel meganiese gryptoerusting nie die mikro-partikels vry nie. Hierdie artikel ondersoek hoe die Van der Waalskragte gebruik kan word vir die mikro-materiaalhanteringsproses deur die gebruik van oppervlakgrofheid gegenereer deur 'n e-straal-laagbedekking van koper en silwer op silikon. 'n Atoomkrag mikroskoop, model Asylum MFP 3 D-Bio met weergawe 6.22A programmatuur, is gebruik om die kragte deur die oppervlakke uitgeoefen te meet. Daar is gevind dat 'n silwer laag-bedekking met 'n oppervlakgrofheid van 1.41nm wortel-gemiddelde-kwadraat (wgk) die hoogste Van der Waalskrag uitoefen, gevolg deur 'n koper laagbedekking met 'n oppervlakgrofheid van 2.72nm wgk; 'n koper laagbedekking met 'n grofheid van 217nm wgk het die kleinste krag uitgeoefen. Dit impliseer dat, vir 'n betroubare mikro-materiaalhantering-sisteem, hierdie laagbedekkings geskik is vir die interaktiewe oppervlakke van die plasings-posisie, die mikro-gryper en die optelposisie.
1. INTRODUCTION
As work parts are down-scaled to micro-parts, adhesive forces gain the upper hand in their manipulation. These adhesive forces include Van der Waals forces, surface tension forces, and electrostatic forces. Gravity release is hampered because the gravitational force is less significant than the other forces [5, 4, 2]; micro-parts would continue sticking to the micro-gripper. Vibrations may be used to release the micro-part, but precision placement would not be possible [2].This paper explores the picking and placing of micro-parts employing one of the adhesive forces (Van der Waals force) using electron beam (e-beam) evaporation coatings of copper and silver. The e-beam depositions generate a surface roughness of a specific root mean square (rms) value that greatly influences the Van der Waals forces exerted [7, 12, 3]. This paper, with experimental data, is a follow-up of an earlier publication in which the application of Van der Waals forces in micro-material handling operations was modelled [9]. In the modelling (which employed the formula of Rabinovich et al. [11]), it was observed that for a reliable picking of a micro-part in a micro-material handling system, the picking place should exert less Van der Waals force than the micro-gripper; and the gripper, in turn, should exert less force than the placement position for an effective release. It was observed that the rougher the surface, the lower the Van der Waals force exerted. The experimental evidence shown in this paper proves these notions.
2. THEORETICAL FORMULAE
The value of the non-retarding Van der Waals force (also referred to as a dispersion force) between an ideally smooth sphere and a flat sample can be calculated using Equation 1 [10,1].

where A is the Hamaker coefficient (a material property that determines the intensity of the Van der Waals force exerted by a given substance), R is the radius of the sphere, and H is the separation distance between the interacting surfaces. In practice, when the surfaces are in contact, the distance H can be taken as H0 = 0.3 nm, since surface roughness would prevent total contact.
An approximate Hamaker coefficient between dissimilar materials, 1 and 2, is given by Equation 2 [6]:

For the rough flat sample, the dispersion adhesion force can be calculated employing Equation 3, which incorporates a correction factor of +1.48 rms [11, 8].

The same correction factor of separation distance (+1.48 rms) is applied to Equation 1 in order to obtain a formula for non-contact dispersion force between a rough plane and smooth sphere, resulting in Equation 4. This equation is used to identify whether Van der Waals forces are the only ones existing in a given experimental case [11].

Derivative of Equation 1 (force for smooth samples) is

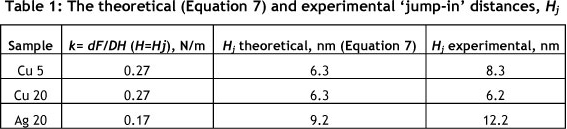
When a probe of the atomic force microscope (AFM) is brought into close proximity with an interactive surface, it experiences an attractive force and jumps into contact with the surface after reaching a certain threshold-separation distance. For the 'jump-in' distance, Hj, the force derivative is equal to the spring constant of the cantilever as represented by Equation 6:

Therefore, the theoretical 'jump-in' distance for smooth samples can be calculated using Equation 7 (a combination of Equations 5 and 6):

3. DESCRIPTIONS OF EXPERIMENTS ON E-BEAM DEPOSITED MATERIALS
An atomic force microscope (AFM), model Asylum MFP 3 D-Bio with version 6.22A software, was used to measure the actual Van der Waals forces exerted by the e-beam deposited samples. The aim of the experiment was to obtain practical evidence to validate the Van der Waals forces modelled in Matope et al. [9] concerning their applicability to micro-materials.
The experimental conditions were as follows:
- Temperature: 23ºC
- Atmospheric pressure: 101.325 kPa
- Humidity level: 20%
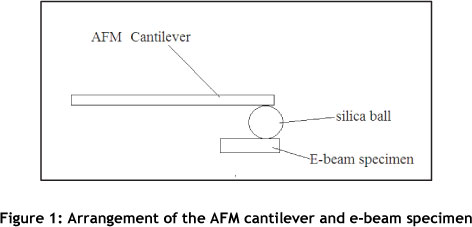
The experiments were conducted using an AFM cantilever with a smooth, spherical, silica tip of 2.5 µm radius, and an rms surface roughness value of 0.2 nm. The velocity of approach and retract of the AFM silica sphere (which was attached to the AFM's cantilever) was 2 µm/s. The arrangement is shown in Figure 1.
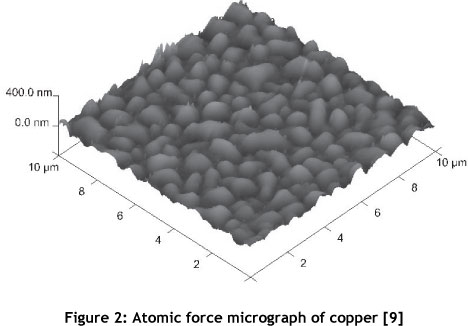
Experiments were conducted on three samples: two of copper (Cu) and one of silver (Ag). These were Cu 5, Cu 20, and Ag 20 (where the numeric values refer to the e-beam deposition times in minutes - for example, Cu 5 stands for copper deposited for five minutes). Figure 2 shows the topography of an e-beam deposited layer as observed by an AFM. The generation of the e-beam coatings is detailed by Matope et al. [9].
Three different cantilevers were used: two with the same k = 0.27 N/m (for copper specimens), and the third with k = 0.17 N/m (for the silver specimen). (A different type was used for the silver specimen because the first two cantilevers were broken and there were no more of the same type.) The Hamaker coefficient for the interaction between silica and copper was taken as A = 7.7 x 1020 J; and for silica and silver as A = 1.5 x1019 J.
Approaching curves (also referred to as extending curves) and retracting curves were plotted depicting the variation of the Van der Waals forces, F, with respect to separation distance, H. Extending curves enable identification and evaluation of active non-contact forces (Van der Waals, magnetic, electrostatic, and others) in a given case. Retracting curves indicate the amount of detachment (adhesion) force.
4. EXPERIMENTAL RESULTS
4.1 Extending curves
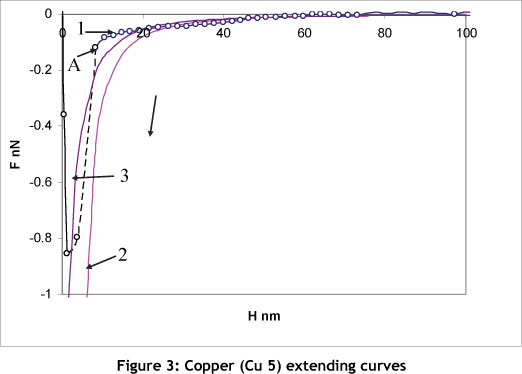
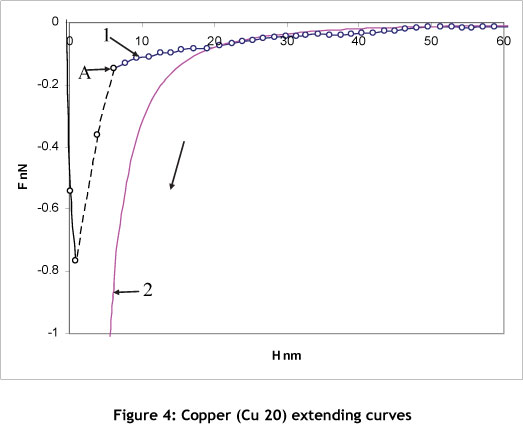
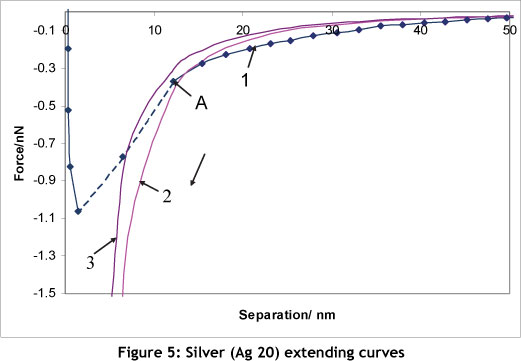
Figures 3 to 5 are extending curves for samples Cu 5, Cu 20, and Ag 20 respectively. In each of the Figures, the curves labelled 1 are the experimentally-obtained graphs; curves labelled 2 are the theoretic non-retarding dispersion force for smooth samples (given by Equation 1); and curves labelled 3 represent the theoretic force for rough samples (given by Equation 4). H is the experimental distance between the silica sphere and peaks of the e-beam coatings. The dashed line shows the sample's 'jump-in' region in which the silica sphere is attracted to the e-beam layer. Point 'A' corresponds to the force derivative as given by Equation 6.
For all samples, the experimental force (indicated by curve 1) agrees with the theory of the dispersion force (curve 2) obtained using Equation 1. Correction of distance H (between peaks of a rough surface and a smooth sphere) made in Equation 4 improves agreement between the theory and the experiment. However, for the very rough sample Cu 20, the correction factor for congruence between experiment and theory should be about 10 nm rather than that suggested by Equation 4, 1.48 rms.
Besides the values of the non-contact attractive force versus the separation distance, the information about the force derivative can be obtained from the 'jump-in' points 'A' in Figures 2 to 4. These results are given in Table 1.
The 'jump-in' regions and the position of point 'A' are very minimal in the nano-range and in the non-retarded region. This proves that Van der Waals forces are the predominant forces in this case, not electrostatic or magnetic forces, nor surface tension forces. Had these last three forces been dominant, the 'jump-in' region would have extended into the micro-range.
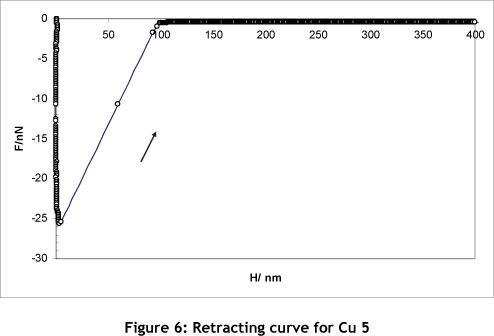
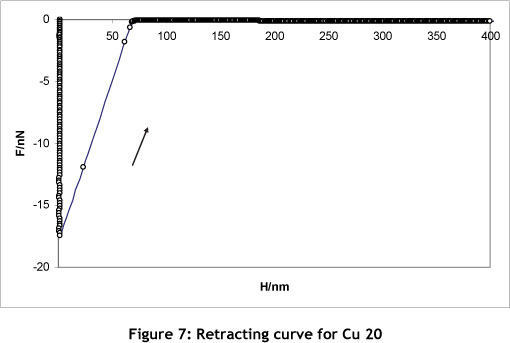
4.2 Retracting curves
Figures 6 to 8 show retracting curves for Cu 5 (Figure 6), Cu 20 (Figure 7), and Ag 20 (Figure 8). The chosen curves demonstrate the value of the adhesion (detaching) force that is close to the average value of the overall force measurements of a given case. Average Van der Waals forces and the scattering of forces are given in Table 2.

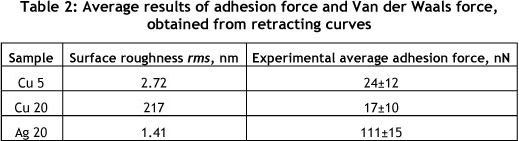
These results are summarised graphically in Figure 9: Ag 20 exerts the largest force, followed by Cu 5; Cu 20 exerts the least force.
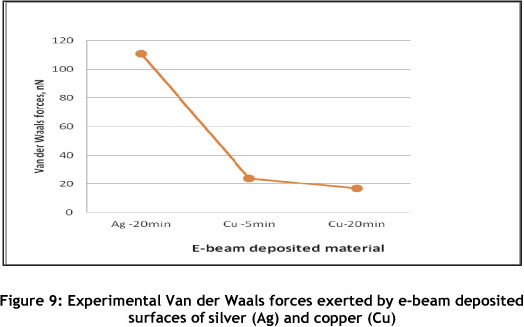
The experimental results prove that the rougher the e-beam coating, the less the Van der Waals forces exerted. Cu 20 is the roughest and exerts the least force, while Ag 20 is the smoothest and exerts the greatest force. A reliable micro-material handling system requires that the place from which a micro-part is picked exerts the smallest force, and the releasing place should exert the largest. Therefore Cu 20 is suitable for the picking place, Cu 5 for the micro-gripper's interactive surface, and Ag 20 for the placement position.
5. CONCLUSION
It was conclusively observed that e-beam coatings generated over different deposition periods result in topographies of different rms values of surface roughness that exert different Van der Waals forces. The experiments proved that the rougher the coating, the less the exerted Van der Waals forces, as modelled by Matope et al. [9].The copper coating deposited for 20 minutes (Cu 20) had an rms surface roughness value of 217 nm, and it exerted an average Van der Waals force of 17 nN; Cu 5 of rms value of 2.72 nm exerted 24 nN; and silver deposited for 20 minutes (Ag 20) exerted the largest force of 111 nN because of its rms value of 1.41 nm. Therefore, in a reliable micro-material handling system, and given these three samples, Cu 20 would be suitable for the picking position, Cu 5 for the micro-gripper's interactive surface, and Ag 20 for the placement position.
REFERENCES
[1] Bohringer, K.F., Fearing, R.S. & Goldberg, K.Y. 1999. Micro-assembly, in Nof, S.Y. (ed.), Handbook of industrial robotics, 2nd edition. Wiley & Sons. [ Links ]
[2] Bohringer, K.F., Goldberg, K.Y., Cohn, M., Howe, R. & Pisano, A. 1998. Parallel microassembly with electrostatic force fields. Proceedings of IEEE International Conference on Intelligent Robotics and Automation, p. 1204. New York. [ Links ]
[3] Eichenlaub, S., Gelb, A. & Beaudoin, S. 2004. Roughness models for particle adhesion. Journal of Colloid and Interface Science, 280, 289-298. [ Links ]
[4] Fearing, S. 1995. Survey of sticking effects for micro parts handling. IEEE/RSJ International Workshop on Intelligent Robots & Systems (IROS), pp. 212-217. Pittsburgh. [ Links ]
[5] Fukuda, T. & Arai, F. 1999. Microrobotics, in Handbook of industrial robotics, pp. 187-198. New York: John Wiley & Sons, Inc. [ Links ]
[6] Israelachvili, J.N. 2011. Intermolecular and surface forces. Elsevier Inc, London. [ Links ]
[7] Komvopoulos, K. 1996. Surface engineering and microtribology for microelectro-mechanical systems. Wear, 200, 305-327. [ Links ]
[8] Li, Q., Rudolph, V. & Peukert, W. 2006. London-Van der Waals adhesiveness of rough particles. Powder Technology, 161, 248-255. [ Links ]
[9] Matope, S., Van der Merwe, A.F., Nemutudi, R., Nkosi, M. & Maaza, M. 2011. Micro-material handling employing e-beam generated topographies of copper and aluminium. South African Journal of Industrial Engineering, 22 (2), 175-188. [ Links ]
[10] Parsegian, V.A. 2006. Van der Waals forces: A handbook for biologists, chemists, engineers, and physicists. Cambridge University Press. [ Links ]
[11] Rabinovich, Y.I., Adler, J.J., Ata, A., Singh, R.K. & Moudgil, B.M. 2000. Adhesion between nanoscale rough surfaces: I. Role of asperity geometry. Journal of Colloid and Interface Science, 232 (1), 10-16. [ Links ]
[12] Suresh, L., Suresh, Y. & Walz, J.Y. 1997. Direct measurement of the effect of surface roughness on the colloidal forces between a particle and flat plate. Journal of Colloid and Interface Science, 196, 177-190. [ Links ]
* Corresponding author
The author was enrolled for a PhD (Manufacturing Engineering) degree in the Department of Industrial Engineering, Stellenbosch University.

