










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkSAIEE Africa Research Journal
On-line version ISSN 1991-1696
Print version ISSN 0038-2221
SAIEE ARJ vol.114 n.1 Observatory, Johannesburg Mar. 2023
Weight-Based Clustering Algorithm for Military Vehicles Communication in VANET
Mayank SharmaI; Pradeep KumarII; Ranjeet Singh TomarIII
IDiscipline of Electrical, Electronics and Computer Engineering, Howard College Campus, University of KwaZulu- Natal, Durban, South Africa, and Department of Electronics and Communication Engineering, ITM University, Gwalior, India (E-mail mayanksintal@gmail.com)
IIDiscipline of Electrical, Electronics and Computer Engineering, University of KwaZulu-Natal, Durban 4041, South Africa (E-mail pkumar123@yahoo.com)
IIIDepartment of Electronics and Communication Engineering, ITM University, Gwalior, India (E-mail er.ranjeetsingh@gmail.com)
ABSTRACT
In vehicular ad-hoc network (VANET), every vehicle node indicates a mobile node and it acts as a transmitter, receiver and router for the delivery of the information. VANET is a subgroup of mobile ad-hoc network (MANET) and is related to the dynamic topology. Dynamic network scenarios are more challenging issues as compared to MANET topologies, so finding a suitable algorithm for all VANET applications is the major challenge for the researchers. Routing protocols in VANET are divided into six parts i.e., cluster-based, geocast-based, topology-based, position-based, and broadcast-based. Autonomous robots and unmanned military vehicles (UMVs) become part of the advanced warfare strategy to execute dangerous war field operations and military combat missions. The military vehicles (MVs) transfer information to each other in order to achieve required military tasks collectively. In the proposed work, rhombus shaped area is divided into multiple clusters using a weight-based clustering algorithm for transmitting the event information to the vehicles. Intersection clustering with rhombus shaped area which are very effective for clustering. To choose cluster head (CH), the proposed method has used two weighted metrics, one is real time average speed and the other parameter is degree. This work is useful for choosing right CH in the network. Each vehicle in the same cluster transmits the data to the CH instead of broadcasting it. The simulation has been done in the SUMO and NETSIM simulator, which shows the network performance for the different protocols like Ad-hoc on-demand distance vector (AODV), dynamic source routing (DSR) in terms of packet delivery ratio, throughput, delay, overhead transmission, mean and standard deviation.
Index Terms: VANET, OBU, Routing Protocols, Manned and Unmanned Vehicles, Cluster Head, SUMO, NETSIM.
I. Introduction
BY using intelligent electronic tools known as on-board Units (OBUs), vehicles are now equipped with computers on wheels because micro hops and wireless communication technologies are constantly improving. The OBU consists of a microcontroller, a global positioning system (GPS), sensing devices, storage devices, and a wireless transceiver that enables in VANET.
As long as vehicles are equipped with OBUs, they can currently connect to other vehicles and as they travel on the road with secure roadside structures when they go through series of interconnected network. In similar scenario to base stations, roadside units (RSUs) are revolutionary infrastructure elements that are connected to the internet backbone through transmit signals. The RSUs are intended to provide message dissemination, protection, and network constancy to vehicular networks by locating themselves at dangerous intersections of the road, such as nodes or construction sites. In order to accomplish this, 75 MHz of color band in the 5.9 GHz band has been allocated for the dedicated short-range communications (DSRC) standard, a set of protocols and measures for vehicular trade data throughout which real-time multimedia uses, including peer-to-peer (P2P) substance provisioning, can be deployed in the future and many facilities can be delivered. In Europe and Japan, a similar band has been distributed. VANETs are ad-hoc networks, but they differ significantly from other transmit signal networks, including sensor networks, MANETs, etc [1].
VANETs provide reliable communication services since they are infrastructure-based. As a result of the high mobility of vehicles, these networks have short connection time. For example, two vehicles moving in a similar direction and starting at the same position can only keep a reliable link for 25 seconds between them if one of them is faster by 10m/s and range of sending information to people by using communication range is 150-200m through technology. As a result of the limited motion and dependence on each other vehicles have to be viewed separately. As a result of a movement, it is possible for links to fail at times, so exchange multi-hop paths are useful for validating associates between vehicles for long period of time. The VANET is consist of applications including security, traffic control, commercial ad distribution, driver assistance, web surfing, voice, games, and infotainment. Multi-application units (AU) can be found in vehicles, that are built-in or portable communication devices that have numbers or collections of different applications and things to communicate with. These uses have dissimilar hold-up conditions, consistency, and security. It is well known fact the size of VANET competent enough to pass, express, achieve and show the safety warning on the road. As a result of this many countries has already adopted this methodology to countries the practices of unsafe vehicular application [1]. In VANETs vehicles equipped with wireless form a system of lines. Wires are connected with each other impulsively through travelling sideways the road.
The quality of node movement recognizes VANETs from different sorts of ad hoc networks. So, the structure of an effective routing protocol is very essential for VANETs. The bandwidth resources in VANETs are limited and the network topology can change frequently. Therefore, it is not required to keep routes to every node. The dynamic modification in topology reduces the effective routing time. Similarly, it decreases operation rate of routing information [2].
Thus, on-demand routing system of rules that explains the correct conduct and procedures to be followed in formal situations are better for VANETs. These protocols generally include two procedures- Route Maintenance and path innovation. When a source node that has no routing information within routing table desires to create a route to the target node, the route discovery process is activated. The source node transmits routing request packets through the group of people or organizations that are closely connected and work with each other by flooding. At the point when this packet achieves the target node, node transmits a route response packet to the source node. This system has a turnaround path among the origin node and end node. When the node changes and if some connection on the initial path can be discontinued, then the path keep on processing it will be activated. AODV routing arrangements is accurately used to carry on variations of figure or size in need of routing protocol for VANET [2].
Cluster-based techniques divide vehicles into subgroups, clusters, for task subdivision to provide communication services with minimum network requirements. In VANET clustering, cluster heads (CHs) are an essential part of the cluster formation process. Input metrics can be used to develop a cluster in a variety of ways. The member vehicle of a cluster is called cluster member (CM) [3], [4]. Weight based cluster algorithm has been designed to identify CHs dynamically in vehicular ad-hoc network. Sensor network in general has several constraints as compared to traditional network scenario. Hence it is not appropriate to apply the weight cluster algorithm to the wireless sensor network because it does not take the transmission rate, power energy among others factors in-to consideration [3].
In [5], authors examined a dynamic open key framework for VANETs to transfer the part of the focal affirmation power among an arrangement of dynamically elect certificate authorities (CA)s. Decision of dynamic CAs based on a clustering algorithm where CHs plays out the part of testament experts. These certain nodes are expected to implement as the registration authority (RA) In [6], a dissimilar kind of clustering method was defined, that has two tier architectures called as mobility infrastructure based VANET (MI-VANET). Buses are utilized as communiqué backbone due to its larger overlapping radio range and they are at a fixed distance from each other (as they depart at interval of 15 minutes). Vehicles present in lower tier are needed to register first with the nearest vehicle for communication. Thus, when a vehicle (source car) wants to deliver information, it has to first deliver the information to its registered vehicle (source bus) via technique called mobile infrastructure registering (MIRG) MI-VANET has enhanced the availability amongst clusters and the simulation result indicates predominant data delivery ratio and increment in network throughput [6]. In [7], authors introduced that in the most recent couple of years VANETs have received expanded consideration as the potential technology to upgrade dynamic and preventive security out and about, and in addition travel comfort. In the event that vehicles can be given data about such occurrences or activity circumstance in continue, the class of driving can be enhanced essentially in states of time, distance, and safety. One of the main challenges in VANET is to investigate the effective route for transporting data information.
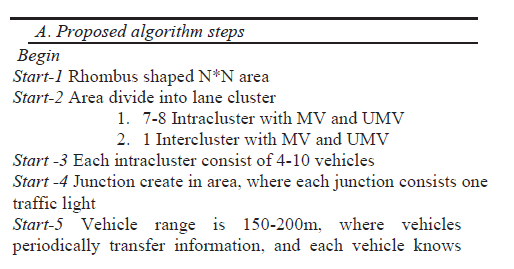
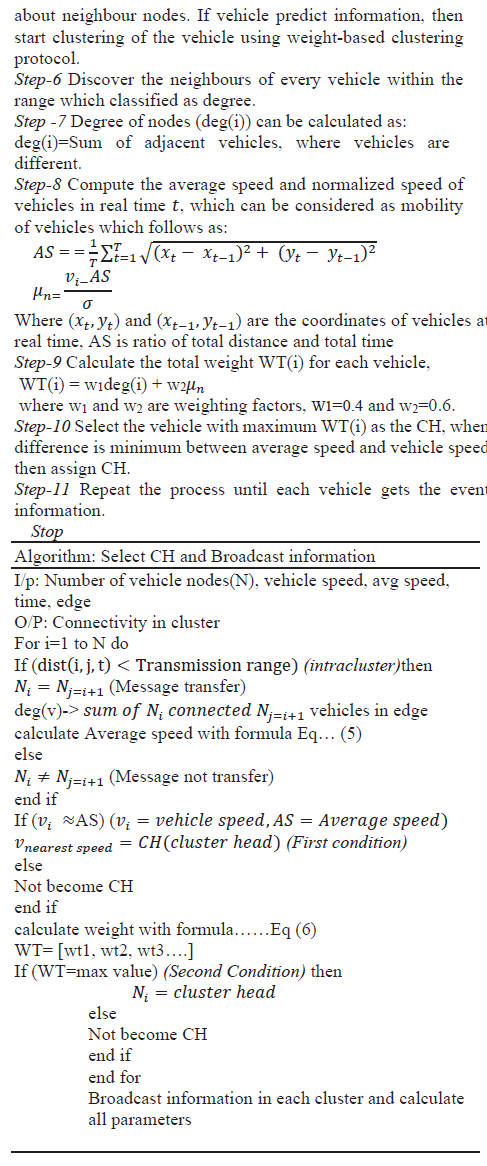
In this proposed work, the weight-based clustering technique is proposed using average speed of vehicle and degree of each vehicle for rhombus shaped network. In the existing technique vehicles move in uniform speed but due to lack in stability of CH. In proposed algorithm, we have used rhombus shaped clustering path with (150-200m) transmission range of its adjacent vehicles so it is very effective for stability of CH and reduce overhead transmission. Vehicle clustering has been improved by using a rhombus shape intersection path. A rhombus shape path has eight lanes and four central junctions. Each lane forms a cluster, and each cluster contains between four to ten vehicles. This clustering technique is more effective than other clustering methods so we can easily measure the relative speed and degree of the vehicles in rhombus shape path. We analyzed the results of the proposed work using SUMO interfacing with NETSIM environment. The development of technologies enables smart cities to optimize their traffic is in full swing around the world, industry 5.0 appears more and more often in this context. With Industry 5.0, various capabilities will be combined to create smart solutions. VANETs, Autonomous Vehicles and Industry 5.0 will form the basis for the smart city traffic concept of the future.
The rest of this paper is organized as follows. Description of routing protocol is presented in section II. Section III describes the connectivity concept of vehicles in cluster. Proposed work is presented in section IV. The rhombus shaped network simulation results and cluster based simulation results are given in Section V and VI, respectively. Finally, conclusion is given in section VII.
II. Routing Protocol in VANET
Topology based routing protocol link statics and it is set through the vehicle progression. Here, the progression of seeking or saving a path from sender to receiver is compulsory before sending information packets. This routing protocol is based on path matrix. In this routing technique, the option of a path from transmitter to destination depends on connected links statistics formerly collected through the vehicle (proactive/table-driven) or looked for while required (reactive/on-demand) [2], [8]. The progression of seeking or saving a path from transmitter to receiver is compulsory before delivery of information packets [2], [8].
Each vehicle identifies the geographical area and accurate position (as satellite system and global navigation). The expertise of the whole path makes no meaning to send the packet information. They are also known as geographic-based protocol [2], [10], [11]. We can measure vehicle geographical information inside the relay selection system and identify that each vehicle has the ability to identify its geographical position like Global Navigation Satellite System (GNSS). Here, the expertise of the entire route makes no sense to transfer the data information.
A cluster-based routing protocol can be used to group vehicles with similar characteristics, such as travelling in the same direction at about the same speed, and elect a cluster-head to manage the cluster and coordinate intercluster communications. Intra-cluster communications are connected via direct links without a cluster-head [11]. A geocast protocol provides multi-hop wireless communication over an autonomous mobile environment (no infrastructure is required). After being developed for MANETs, it was quickly adapted for other networks such as mesh networks, wireless sensor networks (WSNs) and VANETs. A simple flooding technique is used in broadcast routing protocols in order to reach all vehicles on the network. Message overhead can be reduced by using different relay selection techniques [11], [12].
III. Connectivity in Clusters
If the distance between two vehicles i and j is less than the transmission range i.e. the DSRC communication range, they are considered as neighbors. A vehicle's connectivity level is determined by the number of vehicles directly connected to it. As shown in Eq (1), the number of neighbors of node i at time t is calculated as follows [3].

The value of dist (i, j, t) exists if a connection is established between the vehicles i and j at time t, otherwise it does not exist. Speed is one of the important mobility characteristics involving vehicles moving on the road. In a free flow traffic state, the velocity of a vehicle is assumed to follow a normal distribution. The probability density function (pdf) is given in Eq (2) [3].

Where, σrepresents the standard deviation of the vehicles' speeds and μrepresents the mean speed. Therefore, the vehicle with the closest speed to its neighbours will be given the highest priority for becoming a CH. Eq (3) expresses the mean speed of all the neighboring vehicles speed as follows [3].

The node position NT is given in Eq (4).

where, xt and yt represent the position coordinates of the vehicles. The average speed (AS) of all the vehicles is given in Eq (5) [3].

where, T and t represent the total real time and instant real time, respectively. The normalized speed (μη) of all the vehicles is given in Eq (6)[3].

Where, vt represent the vehicle speed. Each node determines its weight value (WT(i)) using Eq (7) for suitability of becoming a CH [3].


deg(i) = Sum of the adjacent vehicles where vehicles are different. The weight factors associated with each parameter are w1 and w2. The vehicle with the highest weight value is selected as a CH.
IV. Proposed Algorithm
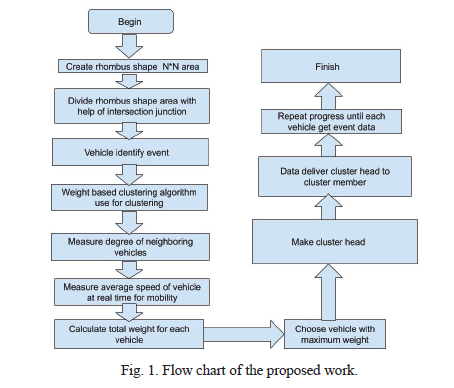
In this work, vehicles are divided into a rhombus shape area with intersection clusters for communication. Whenever a vehicle detects an information, it sends a message to all other vehicles, hence reducing their energy consumption. In the existing technique of vehicle communication, a group of neighboring nodes is maintained, which consumes area and adds overhead to the network. Therefore, sending the message to neighboring vehicles is not an effective technique. In the proposed work, multiple clusters are used to broadcast event information from each cluster to the vehicles. Instead of broadcasting, each vehicle provides data to the CH. We have measured the vehicle speed, the average speed and the degree of vehicles with respect to real time for selecting the CH. When a military vehicle detects a particular information, it forwards the data to the CH, and the CH transmits the data to the other CHs, hence allowing all vehicle nodes to receive the information. This reduces the network overhead and increases the efficiency of the network. Fig. 1 shows the flowchart of the proposed work.
V. Rhombus Shaped Network Simulation Results
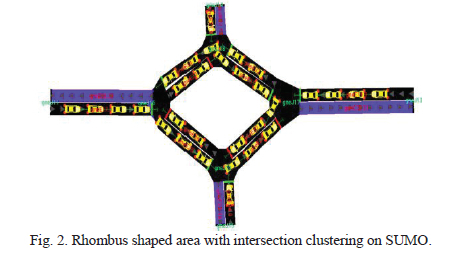
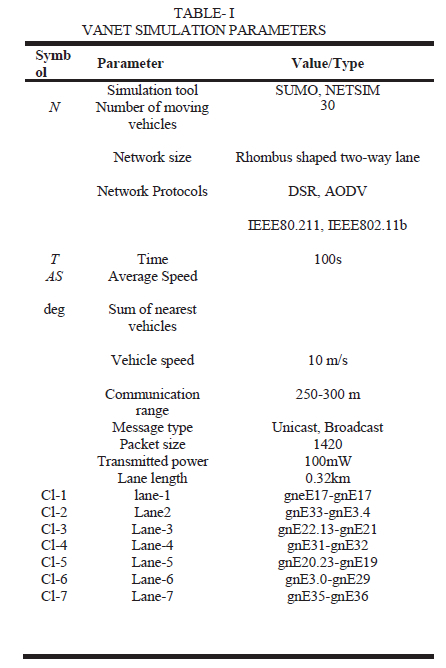
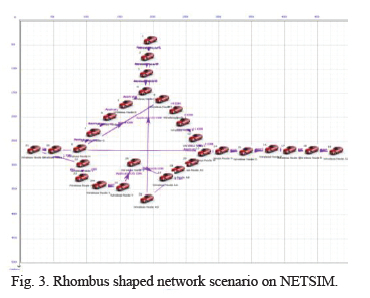
Proposed clustering algorithm was implemented on SUMO interfacing with NETSIM using 802.11p medium access control technique. The simulations were carried with 30 vehicles over the manned and unmanned vehicles in intercluster and intracluster rhombus shaped path. Fig. 2 consists 8 nodes and 16 edges, pair of edges make cluster which is separated with four junctions(jneE16-19). Four traffic lights are used with central junction in rhombus shaped area (0.32km). Rhombus shaped area with intersection gives better clustering path. VANET simulation parameters and vehicles node parameters are given in Table I and Table II, respectively.
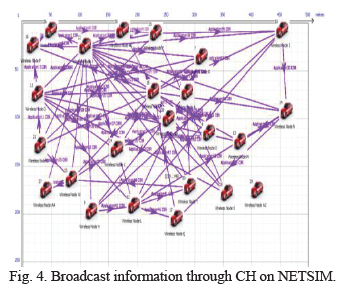
The rhombus shaped network scenario on NETSIM is shown in Fig. 3. Fig. 4 shows that how close a vehicle's mean speed is to its neighbor's mean speed. Therefore, the vehicle with the closest speed to its neighbours mean speed will have the highest priority of becoming a CH. In Fig. 4, CH broadcast information to all vehicle nodes is depicted.
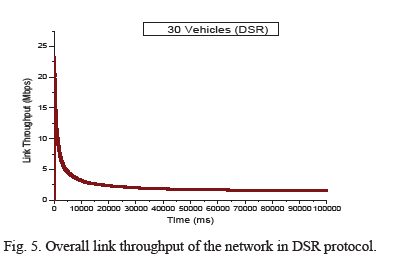
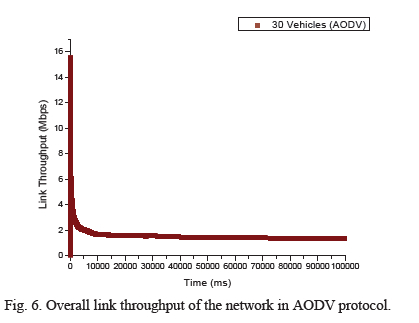
The throughput (Mbps) is calculated as given below:

Fig. 5 and Fig. 6 indicate that initially in rhombus shaped network throughput is increased drastically and after some duration throughput is drastically decreased, so it is clearly indicated that after some time traffic is higher and collision is more in the network. At 1-10 sec the maximum throughput is 23.15 Mbps in DSR and 15.53 Mbps in AODV. It is clearly indicated maximum link throughput is higher in DSR as compared to AODV. DSR protocol takes less time to achieve maximum throughput as compared to AODV.
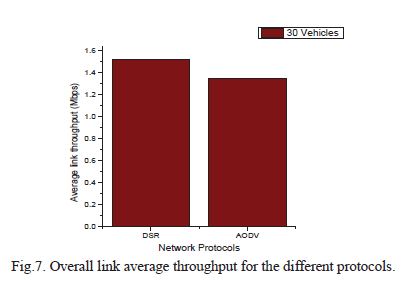
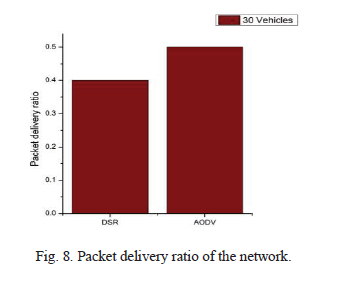
The packet delivery ratio (PDR) is calculated using the following:

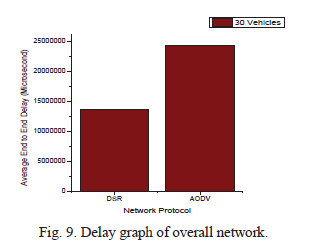
Fig. 7 and Fig. 8 represent the average link throughput and the packet delivery ratio, respectively. The average throughput is higher in DSR and the packet delivery ratio is higher in AODV protocol. The higher values of the throughput and packet delivery ratio indicate the better performance of the network. In the DSR protocol, we can observe lower PDR value and higher link throughput. In less dense network AODV gives better PDR value as compared to the DSR. Fig. 9 represents the average end-to-end delay. The delay is more in AODV protocol as compared to the DSR protocol. This indicates that the packets travelled shorter path.
The overhead transmission refers to the variety of control packets transmitted between the sources and the destinations inside the network. It is the ratio of total overhead bytes transmitted to the total packets transmitted in the network. Fig. 10 shows that the overall overhead is higher for the AODV protocol as compared to the DSR protocol. This indicates that the AODV is not suitable for higher mobility as it gives higher overhead as compared to the DSR. Overhead transmission should be minimum for better reliability of the network.
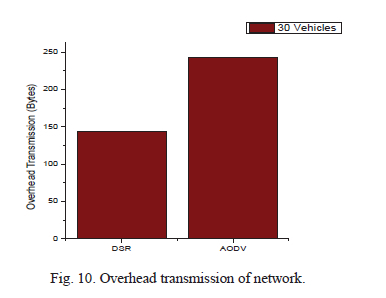
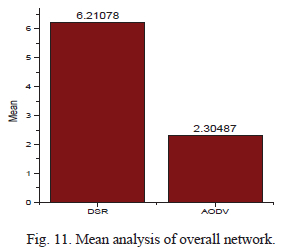
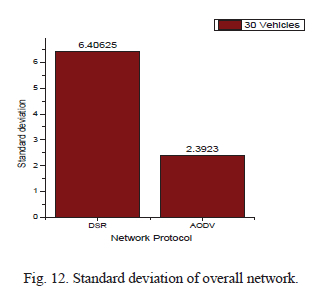
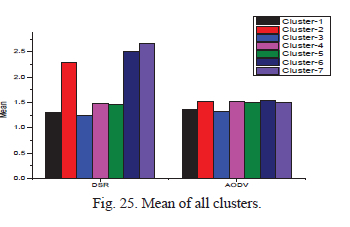
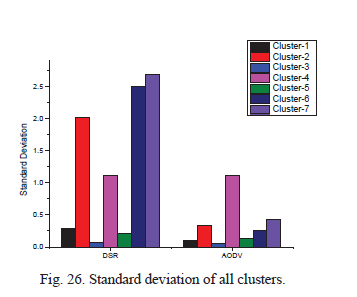
Fig. 11 and Fig. 12 show the mean and standard deviation analysis of the network for DSR and AODV protocols. The mean and standard deviation are important parameters of vehicle speed. Each vehicle can determine how close its current speed is to the mean speed of its neighbors. As a result, the vehicle with the closest speed to its neighbor's average speed will be given the highest priority for becoming a CH.
VI. Cluster Based Simulation Results
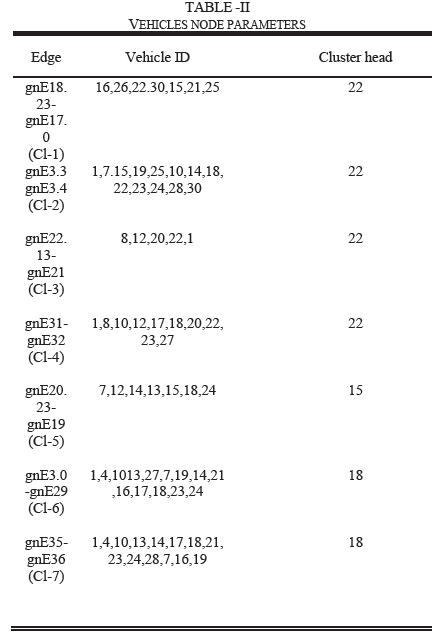
Proposed intracluster algorithm was executed on NETSIM using the 802.11p MAC technology. The simulations were carried out with 30 vehicles over the intercluster and intracluster vehicles. Rhombus shaped area was divided into 7 intracluster. Each cluster consists of 4-10 vehicles. The two vehicles within the transmission range of each another are considered as stable neighbors. Vehicles with the same road ID and moving in the same direction is considered to form a cluster group within a road segment on the highway. Each vehicle can identify how near its real time speed is to the average speed of its neighbors. As a result, the vehicle with the nearest speed to its neighbors' average speed is given the highest priority for becoming a CH. In Fig. 13, cluster-1 consists of vehicle ids-16, 26, 22, 30, 15, 21, 25 and elects vehicle id-22 as CH based on the average speed and the degree. In Fig. 14, cluster-2 consists of vehicle ids- 1, 7, 15, 19, 25, 10, 14, 18, 22, 23, 24, 28, 30 and elects vehicle id-22 as CH. In Fig. 15, cluster-3 consists of vehicle ids- 8, 12, 20, 22, 1 and elects CH to vehicle id-22. In Fig. 16, cluster-4 consists of vehicle ids-1, 8, 10, 12, 17, 18, 20, 22, 23, 27 and elects CH to vehicle id-22. In Fig. 17, cluster-5 consists of vehicle ids-7, 12, 14, 13, 15, 18, 24 and elects CH to vehicle id-15. In Fig. 18, cluster-6 consists of vehicle ids- 1, 4, 10, 13, 27, 7, 19, 14, 21, 16, 17,18, 23, 24 and elects CH to vehicle id-18. In Fig. 19, Cluster-7 consists of vehicle ids- 1, 4, 10, 13, 14, 17, 18, 21, 23, 24, 28, 7, 16, 19 and elects CH to vehicle id-18.
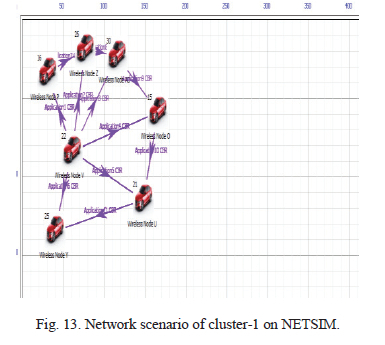
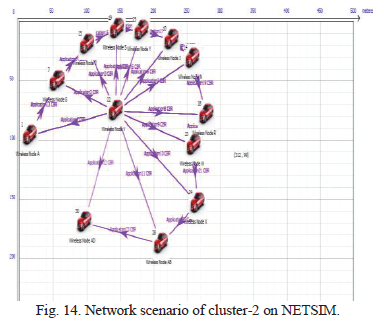
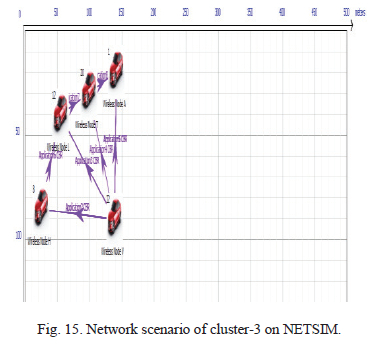
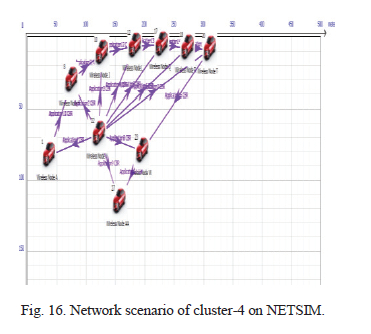
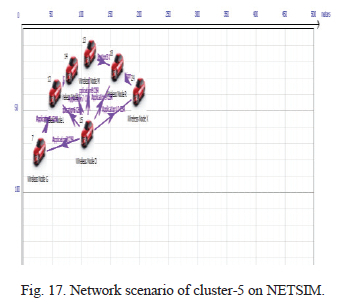
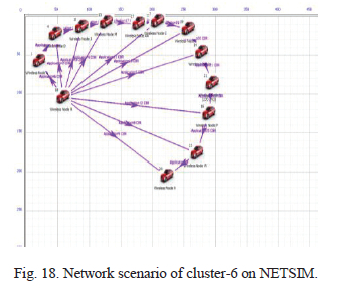
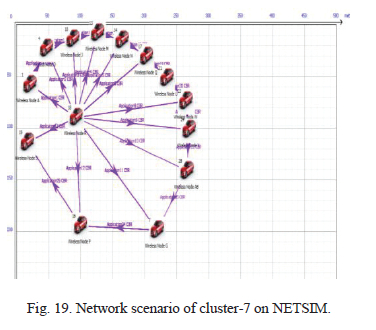
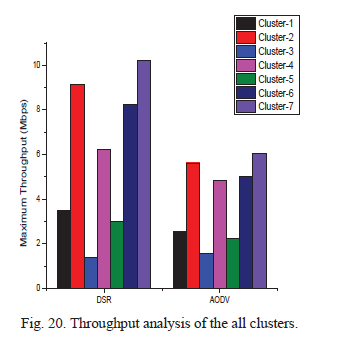
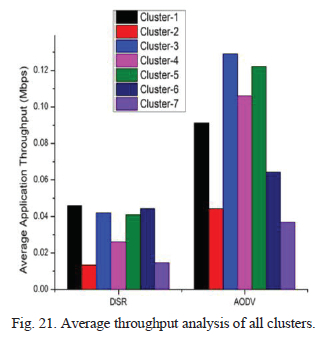
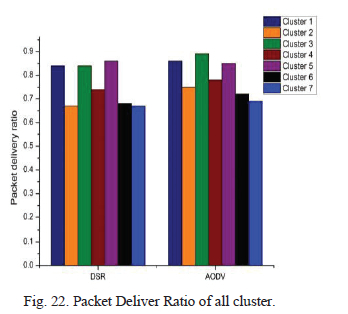
Fig. 20 and Fig. 21 present the throughput analysis of all clusters. In DSR protocol, maximum throughput is higher and application throughput is lower, it indicates that AODV is more effective as compared to the DSR in one-to-one vehicle communication. Fig. 22 shows that the packet delivery ratio is higher in AODV as compared to DSR in all clusters.
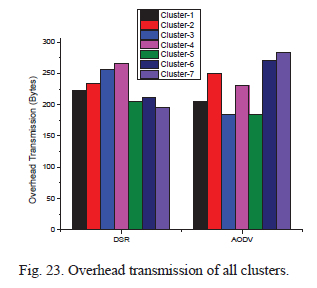
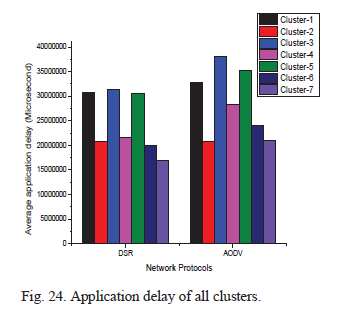
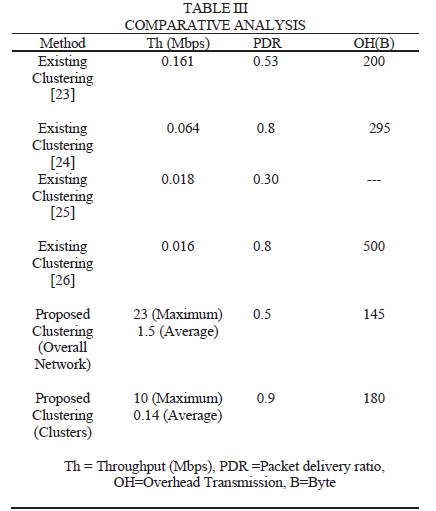
From Fig 23, it can be observed that the routing overhead transmission is higher in AODV in some clusters. In Fig. 24, it can be observed that average delay is more in AODV as compared to the DSR protocol. In Fig. 25 and Fig. 26, it can be observed that the mean and the standard deviation are higher in DSR as compared to the AODV protocol. The higher values of the mean and standard deviation indicate the better performance of the network. According to all simulation results, we can analyze that DSR protocol is more reliable than AODV in rhombus shaped clustering. It is an effective solution for enhancing the safety of the vehicles and provides more reliable network. Comparative analysis of the proposed method with the existing methods is given in Table III. It can be observed that the proposed algorithm provides better performance.
VIII. Conclusion
The weight-based clustering algorithm for dividing the rhombus shaped area into multiple clusters has been presented. The proposed algorithm has been applied on vehicles in the network. Rhombus shaped network is divided into 7 clusters and each cluster consists of 5-10 vehicles. Each vehicle of cluster transmits the data to the cluster head instead of broadcasting. The cluster head election is performed by calculating the average speed and degree of each vehicle with the weight value. When a military vehicle detects certain event then it forwards the data to the cluster head. The presented method is more reliable as compared to the existing techniques. The cluster formation in the rhombus shaped network using presented method provides less network overhead and delay in different protocols whereas high throughput packet delivery ratio, mean and standard deviation while transmitting the data through the cluster heads in different protocols.
References
[1] Y. Zhou, X. Wu and P. Wang, "A novel vehicle clustering algorithm in intersection scenario,"9th International Conference on Advanced InfocommTechnogy(ICAIT),IEEE, 2017, doi:10.1109/ICAIT.2017.838899.
[2] S. Allal and S. Boudjit, "Geocast routing protocols for vanets: Survey and guidelines," 2012 Sixth International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, IEEE, 2012, doi: 10.1109/IMIS.2012.133.
[3] A. Bello, R. Tambawal, R. Md Noor, R. Salleh, C. Chembe and, M. Oche, "Enhanced weight-based clustering algorithm to provide reliable delivery for VANET safety applications" PloS one, vol. 14, no. 4, 2019, e0214664. doi.org/10.1371/journal.pone.0214664. [ Links ]
[4] O. Senouci, S. Harous and Z. Aliouat, "An efficient weight-based clustering algorithm using mobility report for IoV," 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), IEEE, 2018, doi: 10.1109/UEMCON.2018.8796619.
[5] T. Gazdar, A. Belghith and A. Benslimane, "A cluster based secure architecture for vehicular ad hoc networks." ACS/IEEE International Conference on Computer Systems and Applications-AICCSA 2010, IEEE, 2010, doi: 10.1109/AICCSA.2010.5586996.
[6] J. Luo, X. Gu, T. Zhao and W. Yan, "MI-VANET: A new mobile infrastructure based VANET architecture for urban environment," 2010 IEEE 72nd vehicular technology conference-fall, IEEE, 2010, doi: 10.1109/VETECF.2010.5594510.
[7] A. Chinnasamy and S. Prakash, "Chronicles of Routing Protocols for Vehicular Ad-Hoc Networks" International Journal of Engineering Research and Applications (IJERA), vol. 3, no. 2, pp. 540-542, 2013. [ Links ]
[8] R. S. Raw, S. Kumar, and S. Das, " An Efficient Position-Based Routing Protocol for Vehicular Ad hoc Network in City Traffic Scenarios" RISTEP-2010, 2010.
[9] Y.W. Lin, Y.S. Chen and S.L. Lee, "Routing protocols in vehicular ad hoc networks: A survey and future perspectives." J. Inf. Sci. Eng., vol. 26, no. 3, pp. 913-932, 2010. [ Links ]
[10] R. S. Raw and D. K. Lobiyal, "B-MFR routing protocol for vehicular ad hoc networks." 2010 International Conference on Networking and Information Technology, IEEE, 2010, doi: 10.1109/ICNIT.2010.5508482.
[11] S. Allal and S. Boudjit, "Geocast routing protocols for VANETs: Survey and geometry-driven scheme proposal", Internet Serv. Secur., vol. 3, no. 1/2, pp. 20-36, 2013. [ Links ]
[12] A. Shastri, R. Dadhich and R.C. Poonia, "Performance analysis of on-demand Routing protocols for vehicular ad-hoc Networks." International Journal of Wireless & Mobile Networks (IJWMN), vol. 3, pp. 103-111, 2011, doi:10.5121/ijwmn.2011.3407. [ Links ]
[13] J. Bernsen and D. Manivannan, "Unicast routing protocols for vehicular ad hoc networks for VANET", International Journal of Intelligent Networks, vol. 2, pp.148-155, 2009. [ Links ]
[14] Y. Wang and F. Li., "Vehicular Ad Hoc Networks. Guide to Wireless Ad Hoc Networks, Computer Communications and Networks, pp. 503-525, 2009, doi: 10.1007/978-1-84800-328-6 20.
[15] R. Kumar and M. Dave, "A comparative study of various routing protocols in VANET", International Journal of Computer Science Issues (IJCSI), vol. 8, no. 1, pp. 643-648, 2011, https://doi.org/10.48550/arXiv.1108.2094. [ Links ]
[16] A. Varga. "Using the OMNeT++ discrete event simulation system in education", IEEE Transactions on Education, vol. 42, no. 4, 1999, doi: 10.1109/13.804564. [ Links ]
[17] K. Deepa Thilak, A. Amuthan "DoS Attack on VANET Routing and possible defending solutions-A Survey" International Conference on Information Communication and Embedded System (ICICES 2016), 2016, doi: 10.1109/ICICES.2016.7518892.
[18] J. Misic, G. Badawy, S. Rashwand, and V. B. Misic. "Tradeoff issues for CCH/SCH duty cycle for IEEE 802.11 p single channel devices", 2010 IEEE Global Telecommunications Conference GLOBECOM 2010. IEEE, 2010, doi: 10.1109/GLOCOM.2010.5684264.
[19] L. Miao, K. Djouani, B. J. Van Wyk, and Y. Hamam, "Performance Evaluation of IEEE 802.11p MACProtocol in VANETs Safety Applications," In 2013 IEEE Wireless Communication and Networking Conference (WCNC), pp. 1681-1686, 2013, doi: 10.1109/WCNC.2013.6554813
[20] A. Abdel, Rahim, F. Bai, S. Bai, C. Basnayake, B. Bellur, G. Brown, S. Brovold, L. Caminiti, D. Cunningham, H. Elzein and K.P. Hong, "Vehicle Safety Communications-Applications (VSC-A) Final Report. No. DOT HS 811 492A. United States. Department of Transportation, National Highway Traffic Safety Administration, 2011.
[21] V. Camp, "Vehicle safety communications project: Task 3 final report: identify intelligent vehicle safety applications enabled by DSRC", National Highway Traffic Safety Administration, US Department of Transportation, Washington DC, 2005.
[22] M. Sindhwani, C. Singh and R. Singh, "Implementation of k-means algorithm and dynamic routing protocol in VANET," Computer Systems Science and Engineering, vol. 40, no. 2, pp. 455-467, 2022 doi:10.32604/csse.2022.018498. [ Links ]
[23] B. Elira, K.P. Keerthana and K. Balaji. "Clustering scheme and destination aware context-based routing protocol for VANET", International Journal of Intelligent Networks, vol. 2, 2021, doi.org/10.1016/j.ijin.2021.09.006. [ Links ]
[24] S. K Bansal, A. S. Bisen and R. Gupta. "A secure hashing technique for k-means based cluster approach in VANET", 2016 International Conference on Signal Processing, Communication, Power and Embedded System, IEEE, 2016, doi: 10.1109/SCOPES.2016.7955806.
[25] P. Bhosale and A. Vidhate, "An agglomerative approach to elect the cluster head in VANET", 2016 International Conference on Signal Processing, Communication, Power and Embedded System, IEEE, 2016, doi: 10.1109/SCOPES.2016.7955658.
[26] C. R. Komala and N. K. Srinath, "Routing Solutions of GJIBR for Unica sting and Multicasting over AODV in VANET. "International Journal of Innovative Technology and Exploring Engineering, vol. 8, no. 7, pp. 25812586, 2019. [ Links ]

Mayank Sharma received his Bachelor's degree in Electronics and Communication Engineering, Master of Engineering in Electronics and Communication Engineering in 2012, 2015, respectively. He is pursuing PhD from University of KwaZulu-Natal, South Africa. He has over - 07 years of experience in academic and research. He has held various positions such as JRF, Assistant Professor. He received various awards/fellowship such as srajan award from RGPV University Bhopal. He is the author of many research papers published in various peer reviewed journals/conferences. At present, he is working with the ITM University Gwalior, India. His current research areas include Ad-hoc network VANET, MANET, Wireless Communications etc.

Pradeep Kumar received his Bachelor's degree in Electronics and Communication Engineering, Master of Engineering in Electronic and Communication Engineering and PhD in Electronics and Communications Engineering in 2003, 2005 and 2009, respectively. He completed his postdoctoral studies at the Autónoma University of Madrid. Spain. He has over 17 years of experience in academics and research. He has held various positions such as Lecturer, Senior Lecturer, Assistant Professor and Associate Professor. He is currently working with the University of Kwazulu-Natal, South Africa. His research interests are in the fields of Antennas, Wireless Communications, Signal and Image Processing.

Ranjeet Singh Tomar is a Professor and Dean Academics at the ITM University Gwalior. India. He has obtained M. Tech. Electronics & Communication Engineering from Malviya National Institute of Technology Jaipur, India and Ph.D. degree in Information Technology from Indian Institute of Information Technology Allahabad, India. In an academic career spanning over 22 years, he has published and presented research papers in several national and international journals and conferences in India and abroad. Prof. Tomar's current research areas of interest include wireless communication, digital communication, information theory & coding and vehicular technology. Presently, he is an Editor of the International Journal of Communication, Networks & Computing published by the ITM University Gwalior, India. He organizes several international conferences such as CNC and ICCN. He is an Executive Committee member and fellow of IETE (India). He is also member of the IEEE and IE (India).

