










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkSAIEE Africa Research Journal
On-line version ISSN 1991-1696
Print version ISSN 0038-2221
SAIEE ARJ vol.112 n.1 Observatory, Johannesburg Mar. 2021
ARTICLES
Investigative analysis of channel selection algorithms in cooperative spectrum sensing in cognitive radio networks
J. TlouyammaI; M. VelempiniII
IUniversity of Limpopo, Department of Computer Science, Private Bag X1106, Mankweng,, 0727, South Africa, (joseph.tlouyamma@ul.ac.za)
IIUniversity of Limpopo, Department of Computer Science, Private Bag X1106, Mankweng, 0727, South Africa, (mthulisi.velempini@ul.ac.za). Member, IEEE
ABSTRACT
The proliferation of wireless mobile devices has led to a number of challenges in mobile data communication. The world is experiencing an increasing usage of finite spectrum bands for social media and other data communication services. It is due to this high usage that the Federal Communications Commission (FCC) sought to open up some spectrum bands to be used opportunistically by secondary users (SUs). However, the coexistence of Primary Users (PUs) and SUs may cause interference which leads to wastage of spectrum resources. This study investigates the impact of interferences between PUs and SUs. To ensure higher detection of PU signal, a cooperative rule was used to decide which SU to share and make a final decision about the availability of the spectrum band. To maximize the throughput of SU, a maximum likelihood function was designed to reduce delays in searching for the next available channel for data transmission. To discover more transmission opportunities and ensuring that a good number of free channels are detected, a parallel sensing technique was employed. Matlab was used to simulate and generate the results in a distributed cognitive radio environment. The proposed extended generalized predictive channel selection algorithm (EXGPCSA) outperformed other schemes in literature in terms of throughput, service time and probability of detection.
Index Terms:Cognitive radio network, cooperative sensing, parallel sensing, inter-sensing.
I. Introduction
Arecent introduction of internet of things has brought a different dimension to how wireless devices are connected and communicate. The world saw an increase in mobile devices over the last few years. According to a study conducted [1], the number of mobile devices connecting to the internet is increasing yearly by about 20% worldwide. Given the fact that a spectrum is finite and assigned statically for traditional networks, there is a need to free more bands to cater for the high demand in data transmission. In most parts of the world, frequency bands assigned to military, paging, ham radio and television frequencies are hardly used or there are times when they are not used at all [2]. A proposed solution [2] was designed to allow cognitive radios or SUs to learn a network environment in which they are operating. Programming and configuring radio to efficiently learn their operating environment remained a challenge. Numerous studies were conducted to improve the utilization of the spectrum through using intelligently programmed radio to detect the transmission of licensed users or PUs in the spectrum. Detection is performed by cognitive radio users or SUs to avoid interferences. Detection is often harder under high Signal-Noise-Radio (SNR).
In this paper, considerations are in cooperative sensing where sensing results from SU with higher SNR are discarded for final decision making. In other words, only SU with sensing results below a predefined SNR will be allowed cooperatively to share their sensed data. We use channel selection algorithm to select those channels with the highest chances of being free. This will be achieved through ordering channels in the order of their idling probabilities and using the maximum likelihood function for the selection of channels with the highest probabilities. We propose a scheme named extended generalized predictive channel selection algorithm (EXGPCSA) which is an extension of generalized predictive channel selection algorithm (Generalized Pre. CSA) [4]. The results obtained from two schemes will be compared and evaluated in terms of probability of detection, packets arrival, service rates and throughput.
II. Related work
Authors [6] proposed Signal-to-Noise ratio (SNR)-based weighted cooperative spectrum sensing schemes in CR networks. Weights based on the SNR are assigned to every cooperating SUs and a SU with higher SNR received from a PU signal will have a major contribution towards the final decision. Contrary to this, a study [3] indicated that SNR cannot be the best option for assigning weights since there is a certain threshold, the SNR wall, in which the performance of SUs cannot be improved at all.
SUs in CR networks must have the capabilities to adapt to their time varying environment. To enhance this adaptability, authors [7] proposed a Penalty-Based Weights Adjustment Mechanism (PBWAM) for cooperative spectrum sensing. Past experience of SUs were not considered when designing this algorithm because of the time varying nature of the SUs environment. The weight factors of the proposed algorithm are adjusted based on the recent decision of each cooperating SU. The computation of the final results is made by cooperating SUs using fusion of soft decision. Although the proposed algorithm has shown to minimize the effects of sensing errors, authors did not investigate the effects of delays in exploring the spectrum for detecting the presence of PUs.
Spectrum sensing methods performed at physical layer were integrated into a cooperative MAC protocol to optimize a proposed cooperative MAC framework [8]. An Allocated-group sensing policy (ASP), which is a deterministic sensing policy, was also incorporated into a proposed framework. ASP uses a dynamic ID number approach to detect spectrum opportunities. This policy has shown to be effective compared to the following sensing policies: Random sensing policy (RSP) and Distinct-sensing policy (DSP). ASP allowed different groups of channels to be sensed by SUs and this has substantially increased the average number of channels to be sensed. Allowing different channels to be sensed at the same time, unfortunately incurred more overheads and delays, especially when the number of SUs in cooperative sensing increases. There is no specific number of cooperating users to sense a particular channel, which might lead to over-sensing of channels in a particular group and these would compromise SU's throughput.
The scheme proposed in [9] was designed to allow SUs to collaborate in sensing channels in parallel. The scheme allowed a certain number of SUs to cooperatively sense different channels at the same time and that has shown to significantly improve the efficiency of sensing. An optimum number of channels and a threshold value were key design parameters which determined better sensing results. The numerical results obtained from this study show that a greater throughput was achieved and delays were further minimized. With an observation from the study conducted in [10], the performance or efficiency of the scheme in [9] can further be improved by incorporating channel grouping technique. Authors in [10] incorporated channel grouping technique in their study. However, the strategy for sensing was never emphasized.
The SU's throughput and the impact of interference on PUs in a multichannel opportunistic spectrum access (OSA) were centrally coordinated with random channel assignment [11]. Processes of sensing spectrum were not considered. A similar problem is also studied in [12], in which Authors considered PU and SU networks in multichannel and distributed Ad hoc networks. Unfortunately, zero delays in the processes of sensing the spectrum using genie-aided channel selection were assumed.
A fully distributed channel selection algorithm has been designed to facilitate the coexistence of LTE devices or systems in the unlicensed 5 GHz band [13]. The Game theory and Q-learning approaches were used and their implementations were compared as far as performance is concerned. The effectiveness of this study was evaluated in terms of the signaling requirement, convergence time, as well as the effect of errors in the estimation of throughput.
The study in [16] addressed the overhead problem associated with many SUs which send their observation to the fusion center by partitioning a network into clusters. Clusters send their observation to the fusion center through cluster heads. The clusters are formed through the use of machine learning affinity propagation algorithm. This study has shown the highest performance efficiency compared to other convectional cluster-based schemes. Designing an infrastructure-based scheme is easier considering the fact that the fusion center does not move, despite SUs movement. It would have been interesting if infrastructure less environment was considered along with explored methods.
Modelling channel states is considered as a very important activity in [17]. The channel states are modelled using a stochastic process with joint distribution known to the user. The study considered a fast-varying channel model where the states of the channel are assumed to be identical and independently distributed in each time slot. The state of these channels changes with respect to time. A slow time varying channel model was also considered. Not all channels which have been selected, are good for transmission. Using the two state Markov model, the authors show that the optimal channel selection policy which minimizes the expected time to rendezvous a single selection policy that hops onto the best channel when the fast time varying channel mode is implemented.
A backward propagation training model using neural networks was proposed to predict the future channel state from historic data [18]. In order to reduce the aggressive structural pattern and optimize the structure of a neural network, the genetic algorithm was used to avoid local optimal solution. To increase randomness crossover, a selection and mutation function was performed to extend network convergence to the set that contains the global optimal solution. The results obtained indicated high spectrum prediction accuracy.
Authors [19] designed a novel machine learning algorithm; the support vector machine to select the best possible free channel for transmission by SUs. The algorithm makes use of four parameters to select a better channel. These parameters are the service time, transmitted and received power, maximum vacancy time and data rate. These parameters were used to generate preference order of channels for SUs to perform channel switching. The scheme maintains two queues using the M/M/1 queueing model to minimize the number of channel switching, and poison distribution was used as well to determine the number of SUs arriving in a given time period. A support vector machine achieved an accuracy of 97.6% and the achievable throughput of SUs has greatly improved.
SNR variations, spectrum sensing uncertainties and the availability of desired channel bandwidth make it difficult to avoid mixing of SU and PU signals [20]. The study proposes dynamic channel selection algorithm based on a fuzzy inference system. An algorithm uses the minimum required SNR, desired bandwidth and the probability of miss-detection to select the most appropriate available free channel.
The block chain with mining pool was proposed to support the internet of things services based on cognitive radio networks [21]. Due to channel dynamics, the study emphasizes the challenge faced by SUs in determining an optimal sensing and transmission policy. To derive an optimal transmission policy for SU, reinforcement learning algorithm was used; specifically, Double Deep-Q Network was adopted to allow SUs to learn optimal. Reinforcement learning algorithm was also used in [22] to determine sensing order of channels and cooperative sensing partner selection. SUs use time varying probability of detection of neighbors and select the ones with higher probability of detection for cooperation. The learning rate and performance gain were far better for deep reinforcement learning algorithm than conventional Q-learning algorithms.
To detect the presence or absence of PUs, soft and hard decision detection are usually employed at the fusion center in making a global decision [23]. Soft decision detection always achieves better performance in terms of sensing than hard decision sensing. The scheme was designed to trade-off between band cost and sensing performance. The energy detection was deployed and the decisions are made by sending 1 bit or 2 bits of information. Fusion center makes a final global decision through data reconstruction module which is based on the statistical distribution. Better detection performance was achieved even in lower SNR.
Cooperative spectrum sensing by SUs can greatly improve detection performance in a real cognitive radio network environment [24]. Energy detectors under noise power uncertainty may experience threshold mismatch. Hence, an effective dynamic dual threshold for cooperation spectrum sensing was formulated and "an optimizing combinative fusion rule was designed by tracking optimal voting threshold and credibility of SU's energy statistic jointly". The influence of noise uncertainty was mitigated and spectrum detection accuracy was increased, compared to other detection algorithms in literature.
III. System Models
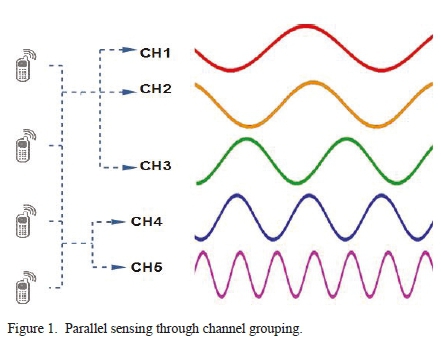
We consider a group of SUs sensing and transmitting data over N channels in a cognitive radio network. Each SU is equipped with two radios with an assumption that there is no self-interference. Channels are modelled using probability density function (PDF) where ON and OFF periods are assumed to be exponentially distributed. Channels are divided into k groups where k=2, such that channels in each group can be sensed simultaneously to allow greater discovery of opportunities. Figure 1 illustrates the grouping of channels. Within each group, channels are ordered in the descending order of their idling probabilities. This technique ensures faster and accurate detection of PU signal in the spectrum bands.
This study prioritizes the protection of PU signal to avoid bandwidth wastage caused by interference by SUs. Hence, a rule was set to determine which SU can participate in making the decision about the availability of the spectrum. Only SUs with higher signal-to-noise ratio (SNR) can share their observations with other SUs. It is exceedingly difficult to detect the PU signal under a low SNR [3]. With a low SNR, there is no certainty in detecting PU signal, which could lead to interferences. Setting a rule to govern how sensed data is shared can improve the performance of the proposed algorithm.
A. Proposed cooperative spectrum sensing and aggregation
Before we delve into how SUs cooperate and how the whole system works, there are few assumptions we make. Although mobility in CR networks is inevitable, we assume slowly moving SUs, such as a network, is not portioned during simulation. SUs are assumed to always have data packets to send and have to first search for idle channels.
Cooperative sensing is performed by a group of SUs in a cooperative cognitive radio network. There are K SUs cooperatively sensing spectrum in a 1000m2 area. Cooperative sensing is performed in the following three steps; first SUs individually sense the frequency bands. They perform what is known as local sensing. Since we are using the hard-fusion rule, each SU sends one bit to a fusion node for decision making. In other words, each SU makes a local decision about the availability or unavailability of the spectrum band.
A decision can either be 1 or 0 where 1 represents unavailability of the spectrum and 0 means the spectrum is available to be utilized by SUs. Secondly, individual SUs report their observations about the spectrum to the fusion node using the common control channel (CCC). Only SUs with higher SNRs are allowed to report their sensing results.
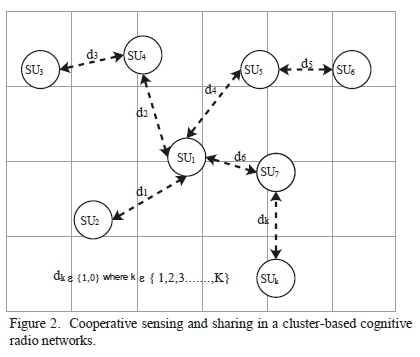
Fusion node receives one-bit sensing results from each SU involved in cooperation. This will greatly reduce communication overheads and bandwidth usage. Each SU maintains a table or vector containing sensed results together with a channel number from which results are obtained. A table is maintained after SUs have sensed and made local individual decision about the spectrum. Figure 2 shows decentralized network architecture for the proposed scheme where dk denotes the sensing results or decisions sent from SUk V k>2 to the fusion node (SU1) for final global decision. The number of channels to be used is limited to six (6) and labelled one (1) to six (6). These channels are meant to be used by both SUs and PUs for data transmissions. Once the results about the availability/unavailability of channels are obtained, SUs share recent results or vector directly with SU1.
Finally, SUi aggregates sensing results stored in the vector to make a final decision. SUi combines the results from neighboring SUs and maintains a table in its buffers to the last 24 sensing results. This is done to keep history of the previously sensed results. This is extremely critical for the estimation of channel parameters. We limited a history to 24 sensed results to avoid buffer overflow. A history is referred to as the previous state of the channel before the current state. SUi will keep previous four states for each channel since the estimation is based on history. E.g., {ON, ON, OFF, OFF} which is equivalent to {1, 1, 0, 0}.
We considered the easiest and fastest way of aggregating data to ensure faster data transmission. After spending considerable amount of time going through what a research community has done, we came with a conclusion to use an OR data aggregation rule. Some of the benefits of this rule are higher detection and faster data aggregation. A major drawback of OR aggregation rule is the fact that the probability of false alarm increases with the increase in the probability of detection [15]. However, this cannot be a hindrance since minimization of delays in finding available channel is a major focus of this study. Although other aggregation rules such as AND or N-Out-M may be used, they incur more delays and give lower detection probabilities compared to OR rule.
We formulate hypothesis for both SUs which individually senses the spectrum and make a decision if it's free or not. The fusion node based on the decision made by the SU, will make final global decision. We first formulate the hypothesis for
SUs for local decision making using Neyman and Pearson and followed by hypothesis for fusion node to make the final global decision.
For Individual SUs, we formulate our hypothesis as follows:

where test statistics is given by 𝜑(𝑦)
Since both PFAand PDtake normal distribution, we give the following interpretations before modelling the system.
(a) The sinking (i.e., X →∞) of γίregion implies that the probabilities in (1) and (2) shrink towards zero.
(b) On the other hand, as the region γίgrows (i.e., X →0), then the probabilities referenced by (1) and (2) will eventually grow towards unity.
(c) Observations in (a) and (b) do not necessarily imply that PFAand PDare equal. The PDgrows much faster than PFA.
(d) The perfect case (PFA = 0 and PD = 1) is the rule we set and seek to achieve. This rule cannot be true when the overlapping of conditional PDFs PiylPi) and P(y\p0) occur.
(e) In order to increase PD, we have to also allow PFAto increase. This provides the fundamental trade-off in the detection theory and hypothesis testing. We are, therefore, motivated to introduce Neyman and Pearson to test our hypothesis.
We setup parametric data models

and hypothesis testing as

The design goal of this test is to maximize the probability of detection such that

A probability in (6) is equivalent to minimizing the probability of miss detection (PM) under the constraints that

We now apply the Lagrange-multiplier in an effort to maximize L.


Maximizing L, we set

We can then calculate the likelihood ratio as

We recall from (7) that the constraint is given by

If we increase threshold μ, both PFAand PDgo down. Similarly, decreasing μimplies that both PFAand PDgo up. In order to maximize PD, we have to choose μsuch that the PFA is as huge as possible under the constraint in (11).
To achieve a specific false alarm rate, we have to determine a threshold that satisfies the equation in (12)

we make the assumption that PFAis a continuous function of μ.
Next, for simplicity, we model fusion node separate from ordinary SU and formulate its hypothesis. Firstly, we consider ΚSUs that are spatially distributed across a wider geographic area as shown in Fig 2 and follow the same probabilistic model:

Every SU makes a decision dkbased on its local observations wkand forward it to the fusion node. The fusion node collects observations from SUs and makes final global decision about the availability of the spectrum band. Instead of SUs sending likelihood ratios to the fusion node, we allow SU to send only decisions (0 or 1) to reduce overheads.
Suppose that a decision dk £ (0,1) for k = 1,2,3.....Κis made by SU k and send to the fusion node. Then the fusion node aggregates and makes a final global decision about the availability of the free channel to transmit based on likelihood ratio formed from the dks. We assume that local decisions or dks are conditionally independent of z.

Where PDkis the kth SU's local detection probability and the probability of false alarm is given by

Where PFA¡kis the kth SU's local probability of false. Taking the log of likelihood ratio, we get
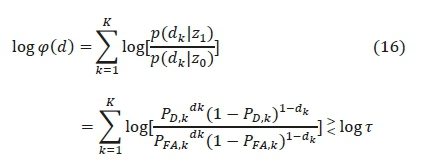
We further simplify the expression by assuming that all SUs have the same performance:

Next, we define the number of SUs having dk=1 as

and its likelihood ratio can be defined as follows:

The SU's local decisions (dk) is meaningful if and only PD > PFA, which means

And its logarithm gives a positive result. Therefore, the decision rule in (19) can further be simplified to:

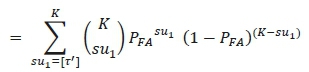
For global decisions to be made by Fusion Node, we choose random variable SU1which is binomial given z1. We therefore have,

Where ρ = PDunder H1and ρ = PFAunder H0. Hence, the global PFAis given by and the global PDis given by

and the global 𝑃𝐷 is given by
It should be noted that any SUs can be selected as a fusion node and all SUs are moving. It is therefore possible to have the current fusion node being at some point in time relegated and have a different SU taking over as a fusion node. Two criteria were used in the selection of fusion node. (i) The SUs with the highest SNR and (ii) the slowest moving SUs. SUs with the highest SNR is better positioned to correctly detect the presence of PUs in the channel. On the other hand, the slow moving SU becomes a suitable candidate since moving at a slower pace implies the network will not be partitioned. That is, a SU that remains in the network before leaving the network grid. In this case, we try to predict which SU is within transmission range of other SUs.
B. Sensing and channel selection
Figure 3 models ON/OFF time distributions. The length of ON periods are represented Vne while OFF periods are shown by Xn V neR. Sensing of the spectrum is done for t ms and no transmission can be done during this time. Blindly selecting t may have a negative impact of the usage of the spectrum [14]. Having smaller t may incur higher sensing overheads while on the other hand making t large enough might lead to missing of transmission opportunities.
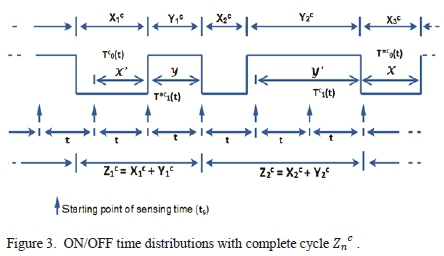
On periods are always followed by OFF periods and this forms a cycle Zncfor all neR. It is very important to identify the beginning and the end of Zncwhich forms a complete cycle. In this cycle, it can then be predicted that a channel is either ON or OFF.
Next, we look at how transmission opportunities can be missed by SUs. x- shows an actual data transmission immediately after an opportunity was missed and can be represented by equation Tc°(t) = 1 - x' and on the other hand Tc±(t) = 1 - y'. There will be no missed opportunity for TCl (t) since sensing was done while channel was busy. In order to reduce missed opportunities, we adopt proactive sensing with adaptive sensing period proposed in [4]. This will be incorporated into our proposed channel selection algorithm to effectively utilize the spectrum. A spectrum is effectively utilized when T*c°(t) = χwhile T*c±(t) = y degrades the performance of spectrum sensing algorithm due interference if ever SUs try to transmit during this period. Carefully modeling Zn° for all n = 1,2,3..,N will ensure maximum discovery of transmission opportunities while reducing interferences by SUs.
Figure 4 presents a two state Markov model. This is used to predict the future state of the channels. SUs should be able to predict the next channel transition state for them to make an informed decision about whether the channel is likely to be available or not. There are two state (0/1) and four state transitions as shown in Figure 4. At a particular point in time, a channel can be in exactly one state or may be in a transition from one state to the next. We will use probabilistic approach in predicting a current and future state of the channel. For example, what is the probability that a channel c is idling after being occupied by PUs for t duration? If we can correctly determine this probability, then idle channel search time can greatly be reduced. Probabilities are defined as follows:
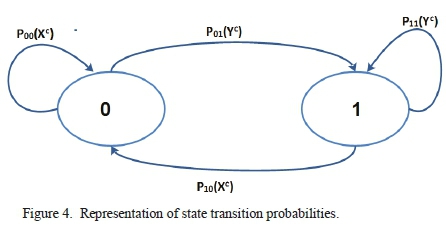
P00(Xc)- a probability that a channel c remains idling
P01(Xc) - a probability that a channel c started in an idling state before changes its state
P11(Xc)- a probability that a channel c remains busy
P10(Xc) - a probability that a channel c begins in busy state before transiting into idling state
These probabilities are modeled using four transition states Markov chain where Sc(t) is the state of a channel c at time t and the sensed result obtained from state Sc(t) is given by Sc(t) and Sc(t) = P00(Xc)= P01(Yc)= Pn(Yc) = PwXc). {0 if channel c is free, 1 if channel c is busy}eSc(t) and {0 if channel c sensed free, 1 if channel c sensed busy } e  c(t) . To maximize SU throughput, it will be necessary to accurately detection the presence PUs while reducing false alarm. To achieve this, we consider the following interpretations:
c(t) . To maximize SU throughput, it will be necessary to accurately detection the presence PUs while reducing false alarm. To achieve this, we consider the following interpretations:
State 1: If channel c is correctly sensed as free; i.e, Sc(t) =0 and the results obtained are such that  (t)=0, then SUs transmit data packets since there will be no interference.
(t)=0, then SUs transmit data packets since there will be no interference.
State 2: If Sc(t) =0 and  c(t) =1, because the channel c idles and the results gives the opposite, this is the state under which a false alarm occurs. More opportunities will be missed and SU throughput will be compromised.
c(t) =1, because the channel c idles and the results gives the opposite, this is the state under which a false alarm occurs. More opportunities will be missed and SU throughput will be compromised.
State 3: Here, we consider a case where Sc(t) =1 and  c(t) =0, since decisions are taken based on sensed results, this leads to miss detection. This affects both SU and PU throughput.
c(t) =0, since decisions are taken based on sensed results, this leads to miss detection. This affects both SU and PU throughput.
State 4: If Sc(t) =1 and  c(t) =1, then we correctly detected PU signal in channel c. In this case there will be no interference since SU will sense and switch to the next available channel for transmission. This is also one of the requirements (interference avoidance) of SU in CR networks.
c(t) =1, then we correctly detected PU signal in channel c. In this case there will be no interference since SU will sense and switch to the next available channel for transmission. This is also one of the requirements (interference avoidance) of SU in CR networks.
It is extremely critical to identify Pio(Xc) since this will ensure maximum utilization of transmission opportunities. Identifying opportunities when they begin will ensure efficient utilization of the spectrum and maximum throughput of SUs. It is also important to identify a start of busy period Poi(Yc). This is critical for collision avoidance since detecting the PUs signal when they start occupying a channel would mean that SU should vacate a channel and start its transmission on the next available channel.
To maximize the throughput, SUs should have intelligence to sense and correctly select idling channels for transmission within minimal time possible. From the channel modelling, we allow SUs to maintain a believe vectors, Vpr(t) of dimension N whose contents or elements are the probability correlating with the channel being free from PU at time t. If we let the probability of channel c being free from PU, then δcpr(t) such that

δcpr(t) is derived from ON/OFF time distribution of PU currently using channel c. SU selects a channel c* having the highest probability of being free from PU, that is

Whenever the channel c* is sensed busy, SU selects the next channel with the highest probability of being free from PU. If the selected channel is found to be free from PU, then SU uses the channel for transmission for the duration of At. Correctly sensing and selecting free channels for SU's transmission within minimal time maximizes the achievable throughput of SUs. The throughput of the individual SU is given by

where Ng (t) is the number of frames correctly decoded at the receiving SU till time t and Fsdenotes the frame size in bits. The average throughput of SU network is given by

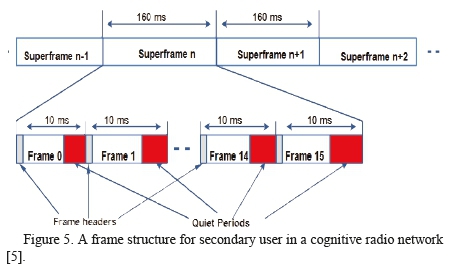
The frame structure shown in Figure 5 is composed of two main phases: sensing and transmission. Sensing has extensively been modeled and explained in Figure 3. We model sensing using PDF assuming ON/OFF time distributions. Transmission phase is marked by a series of data transmission by SU. A spectrum must be sensed before any data transmission. A channel is periodically sensed to ensure faster data transmissions. Since data transmission is performed immediately after an opportunity is discovered, it is critical to find an opportunity as fast as possible to allow faster packet transmission. Hence, a channel selection algorithm was implemented to fast track channels and picks the one with the highest probability of being free.
C. Service time and simulation parameters
Our scheme makes use of Fusion Node for aggregation, processing, and decision making. A Fusion Node maintains a queue of decision reports from SUs on whether the channel is busy or free from PUs. It is therefore important to model the inter-arrival and waiting time before the decision is made by Fusion Node. It is also necessary to monitor the rate at which decisions are being processed. For inter-arrival and waiting times, we define T_k as the time elapsed between (k-1) st and the kth event. The sequence of SU's inter-arrival time is given by

Ti, T2, T3........., TKfor k £ {0; ∞} are identically independent distributed exponential random variables with mean 1/y,.
Arrival time for the kth event is defined as

and the gamma distribution of Skis given by

with parameters k and γ. The expected arrival time is given by

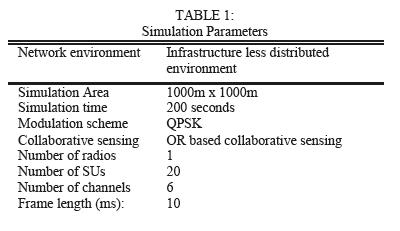
Presented in Table 1 is the simulation parameters used to simulate our proposed scheme.
IV. Analysis of Results
This section discusses the results obtained through simulating cognitive radio networks. simulations were carried out in MATLAB for 200 seconds in area coverage of 1000m2. QPsK was used to modulate the signal and the transmission was done over six channels.
su rely heavily on sensing to avoid interferences with Pu. one of the factors influencing signal detection in the channel is SNR. It is indeed difficult to accurately detect signal in the presence of noise. Based on the results depicted in Figure 6, a rule was set to decide which su to participate in sharing sensed results with their neighbors. As it can be observed from Fig 6 the probabilities of detecting a PU signal increases with the increase in SNR. The higher the SNR, the better are the chances of detecting the PU signal.
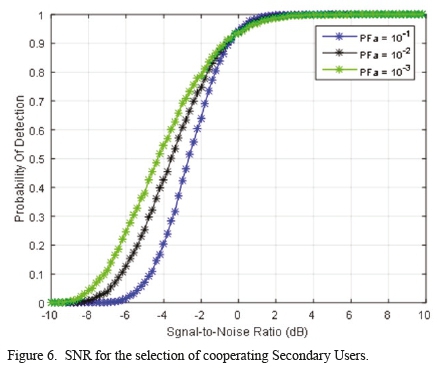
There is at least 90% chance of detecting PU signal for any SNR above 2dB, hence, this serves as the minimum requirement for collaborative sensing. That is, only SUs with higher SNRs (equal or above 2dB) are allowed to forward their observation to the fusion centre. The main motive of setting this threshold is that SUs with lower SNRs often inaccurately detect PU signal which leads to interference. The threshold therefore mitigates interference amongst PUs and SUs and it also ensures maximum utilization of SUs bandwidth.
Figure 7 shows the probability of detection where simulated cognitive radio network consisted of SU where the final decision was made by SU with SNR > 2dB . It is clear that the probability of detection increases as the probability of false alarm increases and that the detection probability of EXGPCSA improves with the increase of μwhere μis a parameter passed to a threshold function.
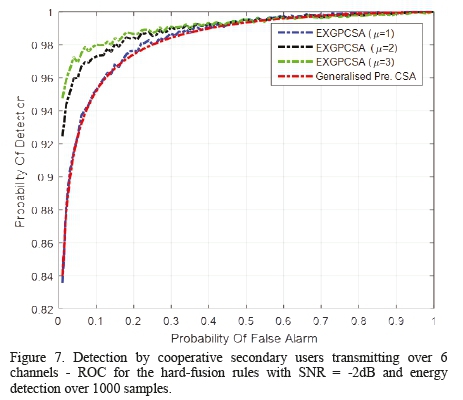
A noticeable increase can be observed for probability of false alarm below 50% in which EXGPCSA kept the probability of false alarm constant while increasing the probability of detection. This shows that changing a value of threshold can somehow have an impact on the detection of PU signal. Our proposed scheme maintained high level of detection through the implementation of a rule set to allow only SUs with higher SNR to participate in collaborative detection and by varying the value of μ. It is important to keep probability of false alarms low and increase probability of detection to enhance performance.
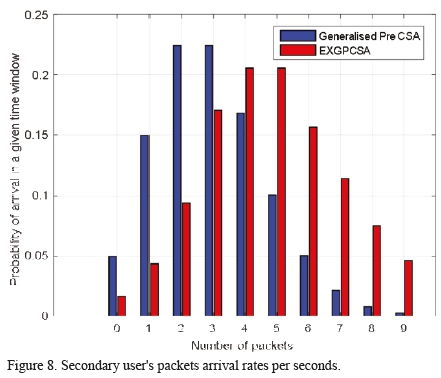
Figure 8 and 9 analyses generalized predictive CSA and EXGPCSA in terms of packet arrival rates and the packet service rates. It is critical to evaluate the performance of the fusion node which performs a critical task of aggregating and making decision about the availability of the spectrum. Hence, two schemes are evaluated on the ability to aggregate or service packets within the shortest possible time. In Figure 8, two (2) and three (3) packets have the highest chances of arriving within a one (1) second time window for generalized predictive CSA while given the same amount of time, EXGPCSA has the highest chances of four (4) and five (5) packets arriving. This means that the rate at which packets arrive at the fusion node is higher for EXGPCSA than generalized predictive CSA.
The processing or aggregating of packets should be faster for EXGPCSA to prevent buffer overflow. It can be observed from Figure 9 that EXGPCSA has lower service time and packets are aggregated within five (5) milliseconds. This contributes to the achievable throughput of SU.
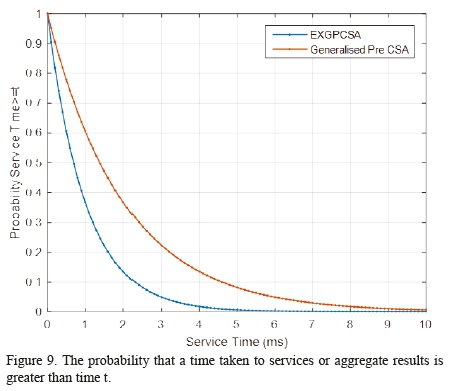
When data is aggregated faster, the decision about the availability of channels for transmission and the throughput is likely to improve. The rate at which packets arrive at the fusion node for generalized predictive CSA is slower compared EXGPCSA. The maximum service time for EXGPCSA is twice lower than the generalized predictive CSA which meets the objectives of our scheme.
Shown in Figure 10 is the average throughput of SU. The average throughput dropped as inter-sensing intervals increase. When spectrum is sensed for a short period of time, less time is taken in sensing and opportunities are discovered faster which leads to higher throughput. The throughput is further compromised when inter-sensing intervals are increased. In this case, more opportunities are missed and delays are incurred affecting throughput in a negative way. One of the reasons why throughput drops is that, increasing sensing time delays data transmission since transmission should be done after sensing.
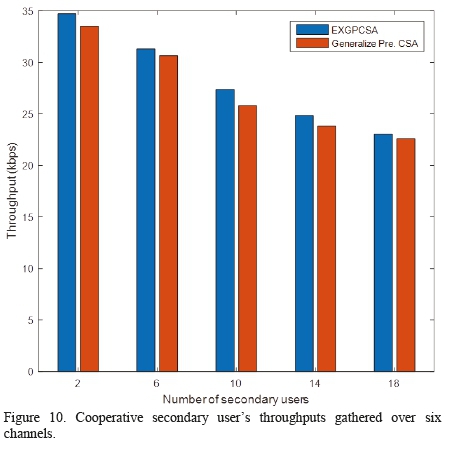
In Figure 10, two schemes were compared and EXGPCSA performed slightly better than Generalized predictive channel selection algorithm in that it deployed a different approach to spectrum sensing. In ensuring accurate spectrum sensing and channel selection, the cooperative sensing and maximum likelihood function were used for developing a spectral map. The maximum likelihood function was used to determine a channel with the highest probabilities of being free. Ninety percent (90%) of the times, channels decided by this function were idling which ensured higher throughput since channel search times were minimized. As it can be observed from the figure, throughput decreases with the increase of cooperating SUs. This happens due contention and limited number channels available to be used by many SUs.
Our study highlights the importance of multi-sensing in a cognitive radio environment where mobility of nodes is inevitable. The transmission of data and sensing of channels can heavily be affected by mobility. Our study addressed this problem by allowing nodes or SUs to share or relay data with any neighbor within their transmission range. In the presence of mobility, network could not be partitioned due to inter-connectedness of SUs. With these contributions, the detection probabilities increased and positively influenced the throughput. The multi-cooperative sensing resulted in reduced sensing delays which, generally, yielded better performance of EXGPCSA.
V. Conclusion and future work.
This study explored cooperative spectrum sensing to mitigate the interferences caused by coexistence SU and PU. The main aim was to maximize the chances of detecting the presence of PU in the spectrum. An intelligent algorithm was used to achieve higher detection rate. To ensure less interference with PU, the study proposed a rule to govern which SU to share their sensed data with their neighbors. This was because the detection is compromised under a lower SNR.
Different techniques for sensing were deployed to ensure the efficiency of the proposed scheme. Allowing only SU with higher SNR to collaborate in sharing and making decisions about the spectrum and parallel sensing technique was a major breakthrough in achieving better performance. Cooperative and parallel sensing were performed in two groups of channels in which channels were ordered in their descending orders of their idling probabilities. ordering channels this way allowed channels to be sorted into a first-in-first-out queue with channels with higher probabilities of being free occupying the front lines of the queue. This approach minimized delays in finding available channels and facilitated faster data transmission to achieve maximized throughput.
A wireless network has many dynamics such a security issues, mobility especially in cognitive radio, different service providers where interoperability is an issue, etc. our future work will incorporate all these issues to evaluate the efficiency of the proposed scheme. It would be interesting to see how our algorithm performs in a decentralized network architecture under the presence of some security threats with all SUs given freedom of movement.
REFERENCES
[1] D. Coyle, H. Williams, R. Cowell, R. Boateng, J. Shoham, P. Arnold and B. Ingram, "Towards a more equal world: the mobile internet revolution Vodafone Group Plc", The Policy Paper Series Number 16, 2016
[2] J. Mitola, "Cognitive radio for flexible mobile multimedia communications," 1999 IEEE International Workshop on Mobile Multimedia Communications (MoMuC'99) (Cat. No.99EX384), San Diego, CA, USA, 1999, pp.3-10, doi: 10.1109/MOMUC.1999.819467.
[3] R. Tandra and A. Sahai, "Fundamental limits on detection in low SNR under noise uncertainty," 2005 International Conference on Wireless Networks, Communications and Mobile Computing, Maui, HI, 2005, pp.464-469 vol.1, doi: 10.1109/WIRLES.2005.1549453.
[4] S. Sengottuvelan, J. Ansari, P. Mähönen, T. G. Venkatesh and M. Petrova, "Channel Selection Algorithm for Cognitive Radio Networks with Heavy-Tailed Idle Times," in IEEE Transactions on Mobile Computing, vol. 16, no. 5, pp. 1258-1271, May. 2017, doi: 10.1109/TMC.2016.2592917. [ Links ]
[5] A. Mody, 2010, "wireless regional area networks-enabling rural broadband wireless access using cognitive radio technology". IEEE 802.22, 2010. [ Links ]
[6] S.W. Wu, J.K. Zhu, L. Qiu and M. Zhao, 2010. SNR-based weighted cooperative spectrum sensing in cognitive radio networks. The Journal of China Universities of Posts and Telecommunications, vol. 17, no. 2, pp.1-7, April 2010, doi: 10.1016/S1005-8885(09)60437-4. [ Links ]
[7] N. ul Hasan, W. Ejaz, and H. S. Kim, "PWAM: Penalty-based weight adjustment mechanism for cooperative spectrum sensing in centralized cognitive radio networks". International Journal of Innovative Computing, Information and Control, vol. 8, no. 10, pp. 6539-6550,Oct 2012. [ Links ]
[8] A. Alshamrani, X. Shen and L.L. Xie, "A cooperative MAC with efficient spectrum sensing algorithm for distributed opportunistic spectrum networks". J. Commun, 2009, Vol. 4, no. 10, doi: 10.4304/jcm.4.10.728-740. [ Links ]
[9] S. Xie, Y. Liu, Y. Zhang and R. Yu, " Parallel Cooperative Spectrum Sensing in Cognitive Radio Networks", in IEEE Transactions on Vehicular Technology, vol. 59, no. 8, pp. 4079-4092, Oct. 2010, doi: 10.1109/TVT.2010.2056943. [ Links ]
[10] G. Prasad Joshi, S.Y. Nam, S.W. Kim and B.S. Kim, "Adaptive window size-based medium access control protocol for cognitive radio wireless sensor networks". Journal of Sensors, Vo. 2016, pp. 9, Jan. 2016, doi: 10.1155/2016/2049859 [ Links ]
[11] M. Chowdhury, and M.F. Kader, "Cognitive Radio MAC Protocols: A Survey, Research Issues, and Challenges". SmartCR, vol. 5, no. 1, pp.19-29, 2015. [ Links ]
[12] S. Srinivasa and S. A. Jafar, "How much spectrum sharing is optimal in cognitive radio networks?," in IEEE Transactions on Wireless Communications, vol. 7, no. 10, pp. 4010-4018, Oct. 2008, doi: 10.1109/T-WC.2008.070647. [ Links ]
[13] A. Castañé, J. Pérez-Romero and O. Sallent, "On the implementation of channel selection for LTE in unlicensed bands using Q-learning and Game Theory algorithms," 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, 2017, pp. 1096-1101, doi: 10.1109/IWCMC.2017.7986438.
[14] H. Kim and K. G. Shin, "Efficient Discovery of Spectrum Opportunities with MAC-Layer Sensing in Cognitive Radio Networks," in IEEE Transactions on Mobile Computing, vol. 7, no. 5, pp. 533-545, May. 2008, doi: 10.1109/TMC.2007.70751. [ Links ]
[15] G. Gu, A.A. Cárdenas, and W. Lee, "Principled reasoning and practical applications of alert fusion in intrusion detection systems". In Proceedings of the 2008 ACM symposium on Information, computer and communications security (pp. 136-147). ACM, pp. 136-147 , March 2008, doi: 10.1145/1368310.1368332
[16] D.M.S. Bhatti, , S. Ahmed, A.S. Chan. and K. Saleem, "Clustering formation in cognitive radio networks using machine learning". AEU-International Journal of Electronics and Communications,vol. 114, pp.152994, Feb. 2020, doi: 10.1016/j.aeue.2019.152994 [ Links ]
[17] C.S. Chang, D.S. Lee, Y.L. Lin and J.H. Wang, "ETTR Bounds and Approximation Solutions of Blind Rendezvous Policies in Cognitive Radio Networks with Random Channel States", arXiv preprint arXiv:1906.10424, June 2019. [ Links ]
[18] P. Supraja, V.M. Gayathri and R. Pitchai, Optimized neural network for spectrum prediction using genetic algorithm in cognitive radio networks. Cluster Computing, vol. 22, no. 1, pp.157-163, 2019, doi: 10.1007/s10586-018-1978-5 [ Links ]
[19] D. Sumathi and S.S. Manivannan, "Machine learning-based algorithm for channel selection utilizing preemptive resume priority in cognitive radio networks validated by ns-2". Circuits, Systems, and Signal Processing, vol. 39, no. 2, pp.1038-1058, February 2020, doi: 10.1007/s00034-019-01140-y [ Links ]
[20] M.W. Khan and M. Zeeshan, "QoS-based dynamic channel selection algorithm for cognitive radio based smart grid communication network. Ad Hoc Networks", vol. 87, pp.61-75, May 2019, doi: 10.1016/j.adhoc.2018.11.007 [ Links ]
[21] N. C. Luong, T. T. Anh, H. T. Thanh Binh, D. Niyato, D. I. Kim and Y. Liang, "Joint Transaction Transmission and Channel Selection in Cognitive Radio Based Blockchain Networks: A Deep Reinforcement Learning Approach," ICASSP 2019 - 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, United Kingdom, 2019, pp. 8409-8413, doi: 10.1109/ICASSP.2019.8683228.
[22] W. Ning, X. Huang, K. Yang, F. Wu and S. Leng, "Reinforcement learning enabled cooperative spectrum sensing in cognitive radio networks," in Journal of Communications and Networks, vol. 22, no. 1, pp. 12-22, Feb. 2020, doi: 10.1109/JCN.2019.000052. [ Links ]
[23] Y. Mi, G. Lu, Y. Li and Z. Bao, "A novel semi-soft decision scheme for cooperative spectrum sensing in cognitive radio networks". Sensors, Basel, Swizerland, vol. 19, vol. 11, p.2522, Jun. 2019, doi: 10.3390/s19112522 [ Links ]
[24] R. Wan, L. Ding, N. Xiong, W. Shu and L. Yang,"Dynamic dual threshold cooperative spectrum sensing forcognitive radio under noise power uncertainty". Hum. Cent. Comput. Inf. Sci, vol. 9, no. 1,pp. 22, Jun. 2019, doi: 10.1186/s13673-019-0181-x [ Links ]
This work is based on the research supported in part by the National Research Foundation of South Africa for the grant, Unique Grant No. 94077 and the Centre for Scientific Industrial and Research (CSIR).

J Tlouyamma was born in Bochum, Limpopo province, South Africa, in 1984. He completed his MSc degree at the University of Limpopo in 2018 and he is pursuing PhD degree. He works as a Data Manager under VLIR-UOS projects, which he has been doing since 2016. He also works as a lecturer at the University of Limpopo's Department of Computer Science. His research interests include cognitive radio networks, big data and data analytics, machine learning and artificial intelligence.

M. Velempini is an IEEE Senior member with research interest in wireless networks focusing on medium access control and routing protocols in 5G and 5G enabling technologies such as the Cognitive Radio Networks, Software Defined Networking, Virtualization and Mobile Edge Computing.

