










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkSAIEE Africa Research Journal
On-line version ISSN 1991-1696
Print version ISSN 0038-2221
SAIEE ARJ vol.111 n.4 Observatory, Johannesburg Dec. 2020
ARTICLES
Leveraging the Technology of Unmanned Aerial Vehicles for Developing Countries
Sheila N. Mugala; Dorothy K. Okello; Jonathan Serugunda
Department of Electrical and Computer Engineering, College of Engineering, Design, Art and Technology, Mak-erere University, Kampala, Uganda (e-mail: {smugala@cedat.mak.ac.ug, dkokello@cedat.mak.ac.ug, jseru-gunda@cedat.mak.ac.ug})
ABSTRACT
The technology of unmanned aerial vehicles (UAVs) renders itself easily to a variety of applications because of their characteristics such as flexibility, quick deployment and cost effectiveness. Developing countries can harness UAV technology for humanitarian and development goals. This paper presents five interesting UAV applications for developing countries and these include disaster management, agriculture, delivery, surveillance of transmission lines and network coverage. UAVs aid the process of disaster management because they can be quickly deployed to take imagery which is used by rescue teams. They offer a cheap alternative to satellites and manned aircraft for agricultural mapping and management. Developing countries are faced with the major challenge of inadequate infrastructure which can be overcome by using UAVs to make especially emergency deliveries. UAVs are more effective at inspecting power transmission lines than manual techniques especially in developing countries where it is expected that the power transmission lines will span over tens of thousands of kilometres. Network coverage can be achieved cost effectively using UAVs for rural remote areas that are neglected by network operators because of their low economic return. This paper also discusses challenges that must be overcome to fully exploit UAV technology for the mentioned applications. Additionally, this paper presents interventions by African governments towards the development of UAV technology.
Index Terms: agricultural UAV applications, disaster communications network, search and rescue, UAV delivery system, unmanned aerial vehicle.
I. INTRODUCTION
An unmanned aerial vehicle (UAV) is an aircraft that operates without a pilot on board [1]. It is more popularly referred to as a drone but various terms are used including unmanned airborne vehicles (UAV), unmanned aerial systems (UAS), remotely piloted airborne vehicles (RPAV), or remotely piloted aircraft systems (RPAS) [2]. When the term system is used it usually refers to both the aircraft and the associated ground control station [2].
UAVs have been in existence for slightly over a century. The first attempt at a UAV was by A. M. Low in 1916 [1], [3]. Various other attempts followed that were aimed at using UAVs for warfare [3]. In the 1940s, during World War II, mass production of remote controlled UAVs, the brainchild of Reginald Denny, started in the US and in 1964, the first UAV was used in warfare by the United States in Vietnam [3].
Advances in electronics made it possible to make smaller and less costly UAVs that found many applications beyond the initial military applications [4], [5]. Contemporary UAV technology finds application in the military, public and civil domains [4], [6]-[8]. In the military, they are used for border surveillance, reconnaissance and strike while public use includes police, traffic safety and transport management and civil applications include rescue operations, area coverage, connectivity, delivery and construction [4], [6], [9].
Unlike similar work that explores UAV applications, this paper focuses on those that developing countries especially African countries can exploit for humanitarian and development purposes. It also discusses challenges that are specific to developing countries that have been drawn from work done in Africa. The rest of this paper is organised as follows. Section II presents the categories of UAVs. Section III discusses the applications for developing countries. Sections IV and V present technical challenges and general challenges respectively. Section VI highlights the government interventions by African countries towards this technology. The conclusion is in Section VII.
II. CLASSIFICATION OF UAVs
UAVs are classified according to the following characteristics that determine the payload and the associated applications including: type, altitude, size, weight, autonomy and energy source [7]. Payload is the equipment and/or objects that are attached to a UAV, for instance sensors, medicine, parcels etc [7].
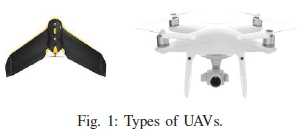
The term type refers to the mechanism of flying [4], [7]. The two major types are fixed wing and rotary wing [5], [10] which are shown in Fig. 1 [2]. Fixed wing UAVs, such as the ebee and the raven, use fixed static wings and forward airspeed to generate lift and have higher speed, greater weights and cover longer distances but need to move forward in order to remain aloft [11], [12]. Rotary wing or multi-rotor UAVs, such as the popular DJI Phantom, use four or more rotors to generate lift much like a traditional helicopter and can hover or remain stationary over a given area, make less noise and do not require a landing platform [5], [12]. The rotors ensure stability [12]. Other types are the hybrid, ornithopters that mimic the wing motions of birds and insects, and those that use a turbo fan [12].
According to altitude, UAVs are classified into high altitude platform UAV (HAP) and low altitude platform UAV (LAP) [4]-[6]. HAPs are deployed at 17 km and above relative to the earths surface, are quasi-stationary and have a long endurance hence the term high altitude long endurance (HALE) while LAPs are deployed a few kilometres above the earths surface, are quick to deploy and have high speeds making them more suited to emergency situations [11].
Classification according to size and weight varies among countries but generally UAVs are either small, medium or large [5], [12]. Their control ranges from manual control without any autonomy to full autonomy over the flight route and UAV operation [4], [12]. Most UAVs are run on batteries but other less popular sources of energy include solar cells that are inefficient, fuel cells that are heavy and airplane fuel [4], [13]. Battery powered UAVs require periodic recharging since their lifetime is short typically 30 minutes [4], [14].
Additionally, there are other parameters that impact on the performance of a UAV including trajectory, altitude of operation and Line of Sight (LoS) operation [4]. The trajectory consists of an infinite number of points that constitute the path that it follows and determines the energy efficiency and delay [9], [14], [15]. The altitude of operation ensures that it avoids terrain and structures [6]. Most countries require that the ground controller/pilot must maintain visual LoS with the UAV [4]. However applications such as delivery over long distances and high obstacles should not be limited by visual LoS instead Beyond Visual LoS (BVLoS) would be appropriate [9].
III. APPLICATION AREAS FOR DEVELOPING COUNTRIES
The High-Level African Panel on Emerging Technologies (APET), a subsidiary of the African Union (AU), identifies some applications (or use cases) for UAVs in Africa [16]. They include land surveying and management, cargo delivery, agriculture, insurance and damage assessments and scientific research [16].
This paper therefore presents use cases that can be harnessed by Africa as guided by the APET report and on our future prospects. It focuses on the following UAV applications: disaster management, agriculture, delivery, surveillance of transmission lines and network coverage. We explain how our recommendations are related to the APET recommendations and why these applications are critical.
Disaster management is related to the APET recommendation of insurance and damage assessment. It consists of three main phases before, during and after the disaster [17]. We believe that risk assessment for insurance is conducted in the first phase before the disaster in order to determine the premium which must be paid by the client (insured party). We observe that damage assessment is conducted in the third and last phase after the disaster in order to determine the amount of compensation. With disaster management, we engage UAVs during the disaster for rescue missions which is missing in the APET recommendation.
Similar to APET, we believe that agriculture in developing countries will benefit greatly from UAVs which provide a cost effective means of farm mapping and management compared with manned aircraft and satellite. However agriculture in developing countries especially African countries is characterized by small holder farms and mixed farming which may complicate their use [18].
We concur with APET on the delivery UAVs. They are especially useful and reliable where the infrastructure is inadequate which is typical of developing countries or infeasible (in mountainous areas and islands) and in case of disaster when it is damaged [19].
In addition to the three applications that are in line with the APET recommendations we believe that other areas such as electric power monitoring and network connectivity can also benefit from using UAVs. The electric power sector in developing countries, for instance in Uganda, is expanding rapidly with commissioning of several power generating facilities such as hydroelectric dams, solar plants and geothermal power plants [20]. Transmission lines that connect generating facilities to consumers are a key determinant in the power quality and therefore need accurate and timely monitoring and decision making which can both be achieved using UAVs [2]. This is especially useful for long transmission lines that are routed through hard to access areas such as national game parks and forests.
The internet penetration in Africa is still low at 30% and yet there are an escalating number of applications that rely on the internet in various fields including agriculture, education, health and governance [21]. UAVs provide a low cost solution for internet access, are suitable to provide connectivity for delivery UAVs and others that require communication with their control center and facilitate Internet of Things (IoT) as data gateways [14], [22].
Using UAVs for land surveying and management and scientific research are also key applications for developing countries though we do not focus on them in this paper. We believe that they would benefit from similar applications especially disaster management, agriculture and transmission line surveillance since they rely on sensed data from the environment. Land surveying and management will be more cost effective and timely using UAVs which require less skill and provide information to the communities in need [16]. City planning authorities in East Africa use UAVs to map streets however the technology would aid in solving the rampant land conflict throughout the region [2]. Scientific research would benefit from data collected by agricultural and disaster management UAVs. Its aim is to use high resolution data to provide comprehensible information for users including government and farmers [16].
In addition to the multitude of applications that can be derived from UAVs, they are anticipated to create commercial opportunities for young people because they come with drone ports, fabrication of drone parts and new skills [2]. In the rest of this section we discuss contemporary implementation of these applications in developing countries. We also discuss their key considerations and constraints that must be addressed for successful implementation.
A. UAVs in Disaster Management
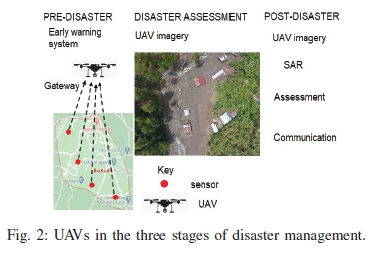
Disaster management involves three stages which include pre-disaster preparedness, disaster assessment and post-disaster [17]. We illustrate the disaster management scenario using UAVs in Fig. 2. In the pre-disaster preparedness stage, the UAV is part of an early warning system that uses sensors to collect data. In the disaster assessment stage, images and videos from the UAV are used for situational analysis of the disaster and planning for relief aid. In the post disaster stage, the UAV is involved in the search and rescue (SAR) missions, formation of the communications backbone and field surveys.
In a search and rescue / track mission, UAVs are required to search for and detect single or multiple targets (stationary or mobile) and keep track of the state of the targets to facilitate rescue personnel to reach the target quickly [4]. UAVs have been used by Uganda Flying labs with other partners (including Mapping Uganda, Drone Nerds Africa and Uganda Red Cross) for mapping damage in Bududa located in Eastern Uganda after the landslides in 2018 [2]. UAVs have also been used in Mozambique and Tanzania to map flood prone areas and for rescue missions [2].
Automatic recognition of people is essential for UAV surveillance tasks such as SAR to complement the human effort [23], [24]. A UAV based situational awareness system for SAR developed and tested in Japan called the Person-Action-Locator (PAL) uses deep learning to detect people and their actions [23]. A method that uses multiple UAVs to search for a single person or target such as a tourist is presented in [24]. The UAV trajectory is determined using the probability distribution of the tourist location and a hybrid evolutionary algorithm. The approach presented is limited to a single target and should be extended to multiple targets as would be the case for a disaster.
When disaster occurs, a reliable and high bandwidth communication network is crucial in delivering support [17], [25]. This communication is needed to assign rescue teams, find victims, deliver relief aid, and communicate with a control center. A wireless area network (WAN) is the most appropriate communication network because it is easily and quickly deployable [17]. Suitable disaster WANs include Mobile Ad hoc Networks (MANETs) or Flying Ad hoc Networks (FANETs) [17]. A FANET is a network of UAVs that provide wireless coverage while a MANET is a network of mobile devices without fixed infrastructure i.e. base station [4]. Reynaud et al. [26] estimated the number of LAPs in a FANET required to support voice and video emergency communication for rescuers after the hurricane Katrina that struck the USA in 2005. They found that each LAP evolving at an altitude of 440 m would support 78 Voice over Internet Protocol (VoIP) calls simultaneously at an achievable capacity of 54 Mbps or 18 H.264 video sessions simultaneously at a 384 kbps bit rate in a 47.39 km2 coverage area. They also determined that a maximum of 12 LAPs were sufficient to provide coverage for 568.68 km2 area [26].
A trajectory algorithm for UAVs is presented in [27] which dynamically deploys a UAV for wireless coverage in SAR for indoor and outdoor rescue teams using both heuristic (genetic algorithm and particle swarm optimisation) and a brute force search space optimal algorithm. They show through simulations that the heuristic algorithm has a shorter execution time and is less complex than the optimal algorithm.
UAV communications networks that support end user devices with limited power are presented in [28], [29] who propose the use of WiFi to connect users to the UAV and for backhaul from the UAV. The deployment algorithms presented in [29] are optimised to minimise the power of the user equipment for static users. For wider coverage other solutions including Worldwide interoperability for Multiple Access (WiMaX) and Long term Evolution (LTE) are appropriate [5].
During flight, UAVs are subjected to noise (or external forces) and atmospheric disturbance such as wind. Hence UAVs need a robust control system to maintain stability [30]. The stability of small UAVs in turbulent environment characterised by high speed winds is studied in [31].
In order to ensure that the mission is not interrupted, the location of the battery charging or docking station should be strategically placed. An algorithm for docking/charging station placement and scheduling at the docking station for an intelligent transportation system (ITS) is presented in [32].
The performance of UAVs should be tested before deployment in a post disaster mapping mission to ensure that pertinent parameters such as flight time, image quality and energy consumption are known beforehand to enable efficient planning by rescue teams [33]. A Human In The Loop (HITL) simulator in [33] gives empirical equations and statistical evaluations that were obtained using real data from a disaster struck area in Japan.
B. UAVs in Agriculture
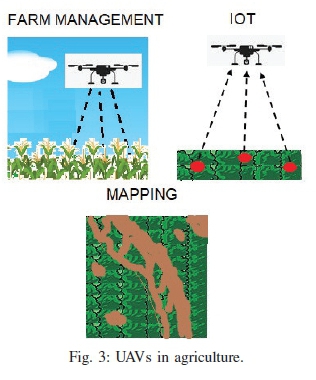
UAVs have a promising prominent role in smart farming. A comprehensive review of drone usage in agriculture is provided in [13]. Applications of UAVs in agriculture include mapping to establish crop and soil health, spraying pesticides, irrigation, planting, artificial pollination and diagnosis of pests [13]. There are, however, no known contemporary cases of UAVs for planting and harvesting. Agricultural UAVs provide a lower cost solution compared to traditional methods utilising manned aircraft and satellites [34]-[37]. UAVs are used for Internet of Things (IoT) in agriculture to collect data from sensors [38]. Fig. 3 shows our visualisation of agriculture with UAVs.
The farming system in sub Saharan Africa is complex and is characterised by smallholder farms with an average size of 2.5 acres which slows down the adoption of UAVs in agriculture since in the short run they seem uneconomical [2]. However, [18] demonstrates the feasibility of remote sensing utilising UAVs mounted with customer grade cameras on smallholder farms in Ghana as a tool for decision support for farmers. More trials of UAV remote sensing are required to accurately assess their usefulness to farmers decision support system. An interesting application of UAVs in agriculture is in IoT where they are used to collect data from sensors deployed on farms i.e. smart farms [38], [39]. The smart farms are envisioned as the solution to meet the expected food demand for the growing population [38]. Sensor data enables UAVs to determine areas that need irrigation or spraying [13]. The UAVs act as communication sinks for the sensor nodes deployed on smart farms [38]. Key benefits of using UAVs is that they can get close to the sensors thus reducing on the sensors transmit power which in turn prolongs the sensors lifetime and reduces the delay in transmitting data [39].
Uddin et al. proposes the use of UAVs as the computing, storage and communication component of the farming system while the sensors are kept light and simple [38]. Additionally they assert that their smart farm system is suitable for harsh weather conditions and does not require infrastructure but requires further interventions to reduce on the energy consumption such as artificial intelligence.
Machine learning is a promising tool in a UAV enabled agricultural system [36], [40]. Support vector machine (SVM) has been used for image classification of UAV imagery obtained from small holder farms in Ghana to delineate and classify maize plants with an accuracy of 98% [36]. Convolutional neural networks have been used to estimate vegetation cover from UAV imagery with an accuracy of 97% and maximum flight time of 16 minutes [40]. Their work demonstrates the applicability of CNN to identify empty patches on farms.
C. UAV-based Delivery System
Delivery of goods and products using UAVs is a fast and efficient delivery method. Amazon, a large delivery company uses UAVs to deliver purchases [4]. Other items that are delivered include medicine, books and food [4]. Zipline uses UAVs to deliver blood supplies to hard to reach areas in Rwanda and Tanzania [2]. Delivery using UAVs is suitable for places with poor infrastructure especially in developing countries, where the infrastructure is infeasible for instance in mountainous areas and islands and after a disaster [41]-[43]. UAVs can also reduce delivery time and carbon emissions in traffic congested cities [41]. The rest of this section discusses pertinent issues that arise in UAV based delivery systems including UAV design, delivery scheduling and routing and control systems for stability.
The payload is limited by the loading capacity and the flight duration, which depends on the battery capacity [44]. There are various proposals on designs of UAVs for delivery of objects. Kumar et al. designed a UAV for payload delivery and crowd monitoring [41]. A dual (or two) rotor UAV presented in [45] is found to be more efficient than the quadrotor in terms of size and power. A UAV food delivery system in [46] makes deliveries in response to a mobile application request to high altitude locations such as floors in multi-storey buildings. A delivery system based on modular UAVs is compared to that with non-modular UAVs in [47]. Using simulations it is shown that modular UAV delivery system is more efficient at reducing delivery time and energy consumption.
The scheduling and routing of UAVs on delivery missions are critical aspects that determine the delivery time, coverage area and cost [42]. There is considerable literature dedicated to solving scheduling and routing problems [42], [43], [48]-[53]. Scheduling also referred to as task assignment is the method used to assign requests to UAVs [42], [48], [50]. A weight-based scheduling scheme in [42] which uses priority and delivery distance as optimisation parameters is compared against the First-Come, First-Served (FCFS) scheme with the former giving a lower delivery time. Routing is the planning of the path for a single or multiple UAVs to make deliveries [48], [50]. A hybrid delivery scheme that utilises cross entropy Monte Carlo and Hungarian method for routing UAVs is presented in [48]. A hybrid genetic algorithm is used in [50] to solve the routing problem for multi drones that deliver parcels with the aid of a ground vehicle.
Given the battery limitations of UAVs, their coverage area is limited but can be extended by collaborating UAVs with either ground vehicles or trains [49]-[53]. The UAVs are carried to anchor points from which they are released to make deliveries [50]. A UAV package delivery scheme is presented in [49] that enables a supplier to utilise both UAVs and trucks in a cost effective way. Additionally they model the expenditure the supplier will incur due to service interruption that may occur when the UAV takes off and when the UAV is involved in an accident. A model that determines the total delivery time for UAV delivery and road delivery is presented in [51]. The author shows that road delivery is more effective than UAVs for longer distances but for rural areas where roads are curvy UAVs may be more effective. Exact and heuristic routing algorithms that give the fastest delivery routes for combined truck and UAV parcel delivery limited to the visual Line of Sight (LoS) are presented in [52]. A UAV and train delivery system is presented in [53] which is shown to give the lowest cost compared with the UAV only and the combined UAV and truck delivery systems. An energy consumption model in [43] minimises cost or delivery time dependent on the battery weight, payload weight and UAV reuse that are implemented as mixed integer linear programs (MILPs). The case of various suppliers sharing UAVs is compared against outsourcing in [49]. They found that outsourcing was more effective for smaller volume of deliveries.
The UAV is subjected to disturbances that compromise its stability and may hinder it from making successful deliveries. A nonlinear control algorithm is applied to a quadcopter delivering payload in the presence of disturbance such as noise and wind in [30]. They use a one-step-ahead nonlinear predictive controller with integral action.
Navigation of UAVs is challenging in an unknown environment such as a disaster area. Autonomous navigation of UAVs is achieved using deep reinforcement learning coupled with Global Positioning System (GPS) signal and environmental sense information in [54]. It does not however consider complex obstacles.
This section has presented key considerations for the implementation of a UAV based delivery system. However, we need to design solutions tailored to low resource economies without much infrastructure to rely on.
D. Surveillance of Transmission Lines
Electric power is a key driver for economic growth [19]. We focus on the power transmission network which increases in length as more users are connected to it to satisfy the power demand. Uganda, which is a developing economy, has a power transmission circuit length of 2,318 km and is planning to extend the transmission grid further since only 22% of the population has access to grid power [2], [20].
Transmission lines must be monitored to ensure reliability and safety of power supply [55]. It is difficult to efficiently monitor a wide power transmission network using the traditional manual techniques such as cameras and binoculars [15]. Additionally manual inspection is inefficient in cases where the transmission line passes through forests and other remote inaccessible areas [15], [56].
Automatic inspection of power transmission lines can be achieved cost effectively and efficiently using a UAV [15], [56]-[60]. It takes photos of the key components of the transmission line which are then studied by the operations and maintenance engineers [15]. These key components are identified in [15] as the tower foundation, lines, insulators, overhead ground wire, optical fiber composite overhead ground wire and the top of the tower. The waypoints on the UAV trajectory are outside an electronic fence formed around the tower to ensure its safety [15].
Image processing algorithms are used to detect transmission lines from UAV imagery for automatic line fault detection [56]. It is difficult to extract aerial images of transmission lines because of the weak target which is a thin line and the complex background which ranges from rugged terrain to continuous vegetation [58]. An object based Markov Random field with anisotropic weighted penalty is proposed in [57] to distinguish transmission line segments from other line segments against varying background. A line fault is detected using basic image processing techniques with varying background in [58]. Semantic segmentation is applied to automatic detection of faults in [59]. Adaptive threshold segmentation, gray variance normalisation method and square wave transformation are applied in [60] to detect the aluminium strands break and surface damage with an accuracy of about 90%.
A UAVs flight attitude is subjected to wind interference as it inspects a transmission line [30], [31]. An auto disturbance rejection control (ADRC) controller is presented in [61] that controls the UAV flight attitude for different types of wind interference including gust or gradual and with varying speed. The authors show using simulations that it performs better than the proportional integral differential (PID) controller [61].
E. Network Coverage using UAVs
A UAV must have reliable connectivity with its ground control station which tracks flight paths and generates control traffic, with ground personnel and with each other to avoid collisions [9], [13]. Ad hoc networks are the most suitable form of communication network for UAVs because of their characteristics such as dynamic topology which results from nodes leaving and joining the network spontaneously and power constraints [6].
A UAV communications or aerial network consists of UAV (aerial) base stations (BSs), terrestrial or ground BSs, UAV (aerial) users and ground users [9], [11]. UAV BSs may be fixed or hover over a coverage area and utilise wireless or wired technology [14], [22]. Those that use a wired network have a cable for power and backhaul requirements similar to the portable BSs and therefore have limited coverage and capacity [62]. Most work focusses on wireless access and backhaul [8], [11], [14], [22], [63]-[66]. Aerial users consist of UAVs on missions such as search and rescue, delivery or area surveying. Ground users would also benefit from aerial BSs which are quick and easy to deploy since they do not require any installation work.
1) Use cases for UAV BSs: Three major applications or use cases for UAV BSs are ubiquitous coverage, relay network and information collection and dissemination in IoT applications [9], [14], [22].
• UAV for Ubiquitous Coverage: For this use case, the UAV BSs are used to offload an overloaded terrestrial BS instead of deploying small cells that are costly [9], [22]. They can be quickly deployed for emergency communications which would require that they are stationed at a cellular BS or other storage facility for instance a disaster management center close to an area that is prone to disasters [17]. They provide a cost effective way to provide connectivity to areas without traditional cellular BSs including rural remote areas and infeasible areas such as forests and the ocean [5].
• UAVs as a Relay Network: UAVs can be used to provide a wireless communication link between distant users that do not have a direct wireless communication link between them and may be separated by difficult terrain such as mountains [9], [63]. A UAV relay is needed to connect data centers for the military which needs to ensure secure communications and therefore avoids the traditional cellular network [9]. It is also required to maintain connectivity between a UAV with limited transmit power and its controller [63].
• UAVs Collecting and Disseminating Information: UAVs are suited to collect data from sensors as they fly over them and disseminate the information to the data collection centers and since they can get close to the sensors less power is required for data transmission [14]. They can conveniently collect data from sensors that are located in areas where there is no terrestrial network coverage for instance in deserts and oceans [5]. UAVs can be equipped with suitable sensors which they can use for data collection especially in hard to reach and dangerous environment such as volcanoes [65].
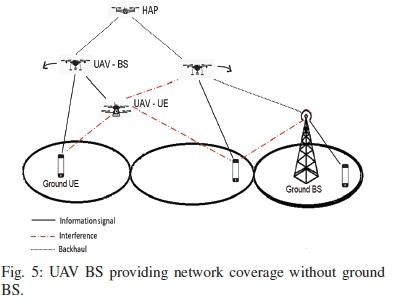
2) UAV wireless communications scenario: We present two main scenarios that that can arise for UAV wireless communications. These are illustrated in Fig. 4 and 5. The circles in Fig. 4 and 5 represent the coverage areas of the BSs. Fig. 4 shows UAV BSs providing network coverage together with a terrestrial BS. The smaller circles represent the coverage areas of the two UAV BSs. It also shows both the ground and UAV user equipment (UE). The anticipated interference that a user and a BS will suffer is also shown. The backhaul links can be formed through the terrestrial BS, satellite or High Altitude Platform (HAP) UAVs. Fig. 5 shows the UAV BSs providing network coverage in the absence of a terrestrial BS in their coverage area. It shows the anticipated interference. The backhaul links, similar to the first use case in Fig. 4, are formed through a nearby terrestrial BS, satellite or High Altitude Platform (HAP) UAVs.

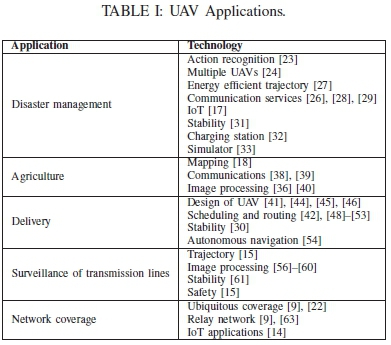
We summarise the UAV applications which can be harnessed by Africa in Table I.
IV. OPEN TECHNICAL RESEARCH CHALLENGES
This section discusses technical research challenges for the applications in section III. It also presents application specific challenges.
A major challenge of UAVs is their limited size, weight and power (sWAP) [4], [6]. In particular, their short endurance of about 30 minutes severely hinders their role in many applications [6], [14], [18], [64]. More research is needed to maximize energy efficiency of UAVs through techniques such as trajectory and communications optimization [14], [64]. Solar powered options are still inefficient and require more research [12]. A promising solution is to use a group or cluster of UAVs that work together to accomplish a task on the same battery lifetime [67]. However, using a UAV cluster complicates collision avoidance, communication requirements and control [68].
Recharging is a fundamental requirement for battery powered UAVs [6]. The placement of recharging docks and the schedule for recharging deserve attention especially in critical missions such as disaster management [32]. Other solutions include recharging via a tether [69] and aerial refueling [70].
Localisation is a key input to the navigation, stability and collision avoidance and its accuracy depends on the on board sensors [71]. For a low cost reliable system, [71] proposes the use of a combination of sensors rather than a single expensive high grade sensor. Some places especially in rural areas or where the environment has changed rapidly for instance in a disaster area do not have Global Positioning System (GPS) for localization therefore we should seek automatic navigation that does not only use GPS [54].
Even though a UAV does not carry human beings at the moment, it needs to maintain stability to enable high quality imagery, other high precision functions such as irrigation, spraying and network connectivity [30], [31]. Therefore more research is needed to develop accurate, low cost, low computational complexity and yet robust controller algorithms that can be implemented on board the UAV with real time processing [31].
Image processing, which is an integral component of most UAV applications, should support real time monitoring for instance of search and rescue missions and transmission lines surveillance [33], [58]. More work is needed to enable accurate automatic fault detection against varying background and detection of different types of transmission lines i.e. single phase, three phase lines, three phase with a neutral and high voltage direct current (HVDC) [56]-[58]. We feel that solutions for the transmission network are applicable to the power distribution network especially as a way to curb illegal connections and power theft. In agricultural applications, image processing should be able to distinguish between crops especially since most smallholder farms in Africa practice mixed farming and it should also identify weeds [36]. Additionally it should be adapted to seasons because as the crops mature, it becomes difficult to distinguish individual plants from aerial images since leaves or branches spread out and touch [36].
Tracking algorithms for search and rescue focus on one target yet disaster scenarios often involve a number of people for instance a rescue team or scattered survivors [23], [24]. We propose that more work is needed to develop tracking algorithms that can follow more than one target simultaneously. We observe that this is especially useful for low resource deployment limited by finances where only a few UAVs can be deployed at a time. These tracking algorithms would also be useful for public safety when more than one target is sought.
Transforming data collected by UAVs into information that is consumable by farmers is still a challenge [37]. We need to define user friendly formats for presentation of the data to users who may have low literacy levels.
The safety of UAVs is paramount especially while monitoring transmission lines which are surrounded by high voltage electromagnetic fields [72]. We need to define the minimum safe distance of UAVs from the transmission line and its accessories through mathematical analysis, simulations and experimentation [15].
We need to analyse the UAV wireless network thoroughly to define its channel model, to determine its performance bounds in terms of communications metrics and to design suitable use cases through simulations and experimentation [5], [11], [73]. This network presents a three dimensional network with links connecting the aerial and ground nodes at varying heights which is in contrast to the traditional cellular network which only considers the two dimensional ground coordinates [74]. Additionally the mobility of nodes varies significantly from stationary to high speeds of 360 km/h which significantly complicates the analysis of the aerial network [5], [6], [75], [76]. We need to define communications metrics appropriately for instance the energy efficiency of traditional wireless networks is defined in terms of the communication energy yet for a UAV the propulsion energy dominates its energy consumption [73].
Another important issue is that aerial BSs and aerial users are likely to suffer severe interference because of the dominating LoS communication links [66]. Additionally aerial nodes will suffer interference from ground BSs and ground users [8].
V. GENERAL RESEARCH CHALLENGES
UAVs are prone to security threats including jammers, malicious attacks and interception of UAVs [6], [9]. There are privacy concerns which arise because they are equipped with cameras and other sensors [5], [16]. We propose frequent revisions of UAV regulations to address security threats and privacy issues.
There is no clear regulatory framework for the use of UAVs in many countries including in Africa where only 14 have published strict regulations that are prohibitive to the growth of the UAV industry [16]. UAV manufacturers, importers, users and academia need clearly defined requirements both general and application specific. These should cover fundamental parameters such as sense and avoid ability, air space usage (i.e. acceptable location, heights and speed of operation of UAVs), and air space spectrum i.e. frequency allocation for UAVs should not interfere with other air space equipment including aeroplanes [5]. Additionally the regulations should be flexible to cater for future UAV use cases.
UAVs can crash into people, buildings, trees, wildlife and other structures and are therefore a risk to society. There have also been cases of UAVs crashing into each other however this may be mitigated by a sense and avoid mechanism. We need to quantify the risk associated with flying UAVs over objects. This will require identification of low risk and high risk areas and development of risk assessment tools [77].
VI. INTERVENTIONS BY AFRICAN GOVERNMENTS FOR UAV RESEARCH
The most notable interventions by African governments towards UAV use and research are seen in Malawi and Rwanda which have opened up their airspace to researchers, UAV companies and manufacturers [2]. The Government of Malawi has set up a 40 km radius UAV test corridor for humanitarian and development use focussing on imagery analysis, connectivity for difficult terrain and delivery of low weight packages [2]. This is one of the first UAV test corridors in the world.
The Government of Rwanda has spearheaded the formulation of regulations for UAV use based on performance [2].
They are being used by other countries as guidelines to developing their own UAV regulations since they are agile and suited to the dynamic industry.
VII. CONCLUSION
This paper has presented five UAV applications that are beneficial to Africa and other developing countries in both the short and long term. UAVs in disaster management detect and track targets. They are especially useful in a disaster area to find survivors, track rescue teams and for disaster assessment. The role of UAVs in agriculture cannot be underplayed. They are useful for farm mapping to monitor crop and soil health, irrigation, spraying and pest diagnosis. They may even attract young people to agriculture. Due to the inadequate infrastructure in Africa and the rest of the developing world, some areas are inaccessible especially by road making it difficult to deliver emergency items such as medication and blood supplies. A UAV based delivery system can make efficient and reliable deliveries of emergency items to remote or inaccessible areas. UAVs can be used in the surveillance of transmission lines to ensure reliable power quality. They are especially useful for long transmission lines that pass through inaccessible places. They can also be used for network coverage where there is no coverage or the coverage is inadequate. They are suitable especially for emergencies because they have a low cost and are quick to deploy. This paper has identified challenges that must be overcome in order to benefit fully from the UAVs. It has also presented general challenges concerning privacy, regulation and safety.
REFERENCES
[1] Y. Zeng, R. Zhang, and T. J. Lim, Wireless communications with unmanned aerial vehicles: opportunities and challenges, IEEE Commun. Mag., pp. 3642, May-2016.
[2] S. Mugala, D. Okello, and J. Serugunda, Unmanned aerial vehicles: Opportunities for developing countries and challenges, in Proc. IST-Africa Conf., 2020.
[3] K. Cook, The silent force multiplier: The history and role of UAVs in warfare, in 2007 IEEE Aerosp. Conf., 2007, doi: 10.1109/AERO.2007.352737.
[4] S. Hayat, E. Yanmaz, and R. Muzaffar, Survey on unmanned aerial vehicle networks for civil applications: a communications viewpoint, IEEE Commun. Surv. Tutorials, vol. 18, no. 4, pp. 26242661, 2016, doi: 10.1109/COMST.2016.2560343. [ Links ]
[5] M. Mozaffari, W. Saad, M. Bennis, Y.-H. Nam, and M. Debbah, A tutorial on UAVs for wireless networks: Applications, challenges, and open problems, IEEE Commun. Surv. Tutorials, vol. 21, no. 3, pp. 23342360, 2019, doi: 10.1109/COMST.2019.2902862. [ Links ]
[6] L. Gupta, R. Jain, and G. Vaszkun, Survey of important issues in UAV communication networks, IEEE Commun. Surv. Tutorials, vol. 18, no. 2, pp. 11231152, 2016, doi: 10.1109/COMST.2015.2495297. [ Links ]
[7] P. J. Singh and R. de Silva, Design and implementation of an experimental UAV network, in 2018 Int. Conf. Inf. Commun. Technol. (ICOIACT), 2018, doi: 10.1109/ICOIACT.2018.8350739.
[8] R. Amorim, H. Nguyen, P. Mogensen, I. Z. Kovcs, J. Wigard, and T. B. Srensen, Radio channel modeling for UAV communication over cellular networks, IEEE Wirel. Commun. Lett., vol. 6, no. 4, pp. 514517, 2017, doi: 10.1109/LWC.2017.2710045. [ Links ]
[9] H. Shakhatreh, A. Sawalmeh, A. Al-fuqaha, Z. Dou, E. Almaita, I. Khalil, N. Shamsiah, A. Khreishah, and M. Guizani, Unmanned aerial vehicles: A survey on civil applications and key research challenges, IEEE Access, vol. 7, pp. 158, 2019. [ Links ]
[10] J. Kim, S. Kim, C. Ju, and H. Il Son, Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications, IEEE Access, vol. 7, pp. 105100105115, 2019, doi: 10.1109/AC-CESS.2019.2932119.
[11] M. Mozaffari, Wireless communications and networking with unmanned aerial vehicles: Fundamentals, deployment and optimization, Virginia Polytechnic Institute, 2018.
[12] B. Vergouw, H. Nagel, G. Bondt, and B. Custers, Drone technology: types, payloads, applications, frequency spectrum issues and future developments, in The Future ofDrone Use. Information Technology and Law Series, B. Custers, Ed. The Hague: T.M.C. Asser Press, 2016, pp. 2145.
[13] J. Kim, S. Kim, C. Ju, and H. Son, Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications, IEEE Access, vol. 7, pp. 105100105115, 2019, doi: 10.1109/AC-CESS.2019.2932119. [ Links ]
[14] Y. Zeng and R. Zhang, Energy-efficient UAV communication with trajectory optimization, IEEE Trans. Wireless Commun., vol. 16, no. 6, pp. 37473760, 2017, doi: 10.1109/TWC.2017.2688328. [ Links ]
[15] T. He, Y. Zeng, and Z. Hu, Research of multi-rotor UAVs detailed autonomous inspection technology of transmission lines based on route planning, IEEE Access, vol. 7, 2019. [ Links ]
[16] African Union/New partnership for Africas development (AU/NEPAD), Drones on the horizon: Transforming Africas agriculture, Guateng, South Africa, 2019.
[17] M. Erdelj and E. Natalizio, UAV assisted disaster management: Applications and open issues, in Intern. Conf. Comput. Netw. Commun., 2016, doi: 10.1109/ICCNC.2016.7440563.
[18] I. Wahab, O. Hall, and M. Jirstrm, Application of UAV imagery-derived NDVI for estimating maize vigor and yields in complex farming systems in sub-saharan Africa, Drones, vol. 2, no. 3, 2018, doi: 10.3390/drones2030028. [ Links ]
[19] J. Ozment, D. Kurtz, and J. Gentry, Transportation infrastructure investment in developing countries: Implications for international marketers, in Global perspectives in marketing for the 21st century. Developments in marketing science: Proceedings ofthe academy ofmarketing science, A. Manrai and H. Meadow, Eds. Cham: Springer, 2015, pp. 96100.
[20] A. Fashina, M. Mundu, O. Akiyode, L. Abdullah, D. Sanni, and L. Ounyesiga, The drivers and barriers of renewable energy applications and development in Uganda: A review, Clean Technol., vol. 1, pp. 939, 2018, doi: 10.3390/cleantechnol1010003. [ Links ]
[21] M. Ismail, M. Kissaka, and P. Mafole, Television white space opportunities and challenges: What next for the developing countries?, in Proc. IST-Africa Conf., 2018.
[22] V. Sharma, M. Bennis, and R. Kumar, UAV-assisted heterogeneous networks for capacity enhancement, IEEE Commun. Lett., vol. 20, no. 6, pp. 12071210, 2016, doi: 10.1109/LCOMM.2016.2553103. [ Links ]
[23] R. Geraldes et al., UAV-based situational awareness system using deep learning, IEEE Access, vol. 7, 2019. [ Links ]
[24] Y. Du, M. Zhang, H. Ling, and Y. Zheng, Evolutionary planning of multi-UAV search for missing tourists, IEEE Access, vol. 7, 2019. [ Links ]
[25] Y. Jahir, M. Atiquzzaman, H. Refai, A. Paranjothi, and P. G. LoPresti, Routing protocols and architecture for disaster area network: A survey, Ad Hoc Netw, vol. 82, pp. 114, 2019, doi: 10.1016/j.adhoc.2018.08.005 [ Links ]
[26] L. Reynaud et al., An integrated aerial telecommunications network that supports emergency traffic, in 14th Int. Symp. Wireless Pers. Multimedia Commun. (WPMC), 2011, pp. 15.
[27] A. Sawalmeh, N. S. Othman, H. Shakhatreh, and A. Khreishah, Wireless coverage for mobile users in dynamic environments using UAV, IEEE Access, vol. 7, 2019. [ Links ]
[28] K. G. Panda, S. Das, D. Sen, and W. Arif, Design and deployment of UAV-aided post-disaster emergency network, IEEE Access, vol. 7, 2019. [ Links ]
[29] V. Mayor, R. Estepa, A. Estepa, and G. Madinabeitia, Deploying a reliable UAV-aided communication service in disaster areas, Hindawi Wirel. Commun. Mob. Comput., 2019.
[30] R. Hedjar and M. A. A. Zuair, Robust altitude stabilization of VTOLUAV for payloads delivery, IEEE Access, vol. 7, 2019. [ Links ]
[31] Z. Ren, W. Fu, Y. Li, B. Yan, S. Zhu, and J. Yan, Enhanced attitude control of unmanned aerial vehicles based on virtual angular accelerometer, IEEE Access, vol. 7, 2019. [ Links ]
[32] H. Ghazzai, H. Menouar, A. Kadri, and Y. Massoud, Future UAV-based ITS: A comprehensive scheduling framework, IEEE Access, vol. 7, 2019. [ Links ]
[33] M. Aljehani and M. Inoue, Performance evaluation of multi-UAV system in post-disaster application: Validated by HITL simulator, IEEE Access, vol. 7, 2019. [ Links ]
[34] M. A. Ezat, C. J. Fritsch, and C. T. Downs, Use of an unmanned aerial vehicle (drone) to survey Nile crocodile populations: A case study at Lake Nyamithi, Ndumo game reserve, South Africa, Biol. Conserv., vol. 223, pp. 76 81, 2018. [ Links ]
[35] C. A. Rokhmana, The potential of UAV-based remote sensing for supporting precision agriculture in Indonesia, Procedia Environ. Sci., vol. 24, pp. 245 253, 2015. [ Links ]
[36] O. Hall, S. Dahlin, H. Marstorp, M. F. A. Bustos, I. born, and M. Jirstrm, Classification of maize in complex smallholder farming systems using UAV imagery, Drones, vol. 2, no. 22, 2018. [ Links ]
[37] K. Jedlika and K. Charvt, Visualisation of big data in agriculture and rural development, in Proc. IST-Africa Conf., 2019.
[38] M. A. Uddin, M. Ayaz, E. M. Aggoune, A. Mansour, and D. Le Jeune, Affordable broad agile farming system for rural and remote area, IEEE Access, vol. 7, pp. 127098127116, 2019, doi: 10.1109/AC-CESS.2019.2937881. [ Links ]
[39] Q. Wu, P. Sun, and A. Boukerche, Unmanned aerial vehicle-assisted energy-efficient data collection scheme for sustainable wireless sensor networks, Comput. Netw., vol. 165, 2019. [ Links ]
[40] M. A. Ghazal, A. Mahmoud, A. Aslantas, A. Soliman, A. Shalaby, and J. A. Benediktsson, Vegetation cover estimation using convolutional neural networks, IEEE Access, vol. 7, 2019. [ Links ]
[41] K. V. M. S. Kumar, M. Sohail, P. Mahesh, and U. R. Nelakuditi, Crowd monitoring and payload delivery drone using quadcopter based UAV system, in Proc. Intern. Conf. Smart Syst. Inventive Technol. (ICSSIT), 2018, pp. 2225.
[42] H. Zhang et al., Scheduling methods for unmanned aerial vehicle based delivery systems, in Proc. 33rd Digit. Avionics Syst. Conf., 2014.
[43] K. Dorling, J. Heinrichs, G. G. Messier, and S. Magierowski, Vehicle routing problems for drone delivery, IEEE Trans. Syst. Man Cybern. Syst., vol. 47, no. 1, 2017. [ Links ]
[44] M. R. Haque, M. Muhammad, D. Swarnaker, and M. Arifuzzaman, Autonomous quadcopter for product home delivery, in Proc. Int. Conf. Ele. Eng. Inf. Commun. Technol. (ICEEICT), 2014.
[45] R. Stopforth, S. Davrajh, and A. Ferrein, Design considerations of the duo fugam dual rotor UAV, in Proc. Pattern Recognition Assoc. South Africa Robot. Mechatron. Int. Conf. (PRASA-RobMech), 2017.
[46] B. Y. Li, H. Lin, H. Samani, L. Sadler, T. Gregory, and B. Jalaian, On 3D autonomous delivery systems: Design and development, in Int. Conf. Adv. Robot. Intell. Syst. (ARIS), 2017.
[47] J. Lee, Optimization of a modular drone delivery system, in Proc. Annu. IEEE Int. Syst. Conf. (SysCon), 2017.
[48] K. Kuru, D. Ansell, W. Khan, and H. Yetgin, Analysis and optimization of unmanned aerial vehicle swarms in logistics: An intelligent delivery platform, IEEE Access, vol. 7, 2019. [ Links ]
[49] S. Sawadsitang, D. Niyato, P. S. Tany, and P. Wang, Supplier cooperation in drone delivery, in Proc. IEEE 88th Veh. Technol. Conf. (VTC-Fall), 2018.
[50] K. Peng et al., A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery, IEEE Access, vol. 7, 2019. [ Links ]
[51] D. Swanson, A simulation-based process model for managing drone deployment to minimize total delivery time, IEEE Eng. Man. Rev., vol. 47, no. 3, pp. 154 167, Sep. 2019. [ Links ]
[52] J. Zhang et al., A VLOS compliance solution to ground/aerial parcel delivery problem, in Proc. 20th IEEE Int. Conf. Mobile Data Man. (MDM), 2019.
[53] H. Huang, A. V Savkin, and C. Huang, Optimal control of a hybrid UAV/train parcel delivery system, in Proc. 38th Chinese Control Conf., 2019.
[54] C. Wang, J. Wang, X. Zhang, and X. Zhang, Autonomous navigation of UAV in large-scale unknown complex environment with deep reinforcement learning, GlobalSIP, pp. 858 862, 2017.
[55] A. Luo, Q. Xu, F. Ma, and Y. Chen, Overview of power quality analysis and control technology for the smart grid, J. Mod. Power Syst. Clean Energy, vol. 4, no. 1, pp. 19, 2016, doi: 10.1007/s40565-016-0185-8. [ Links ]
[56] E. Karakose, Performance evaluation of electrical transmission line detection and tracking algorithms based on image processing using UAV, in Proc. Int. Artificial Intell. Data Process. Symp. (IDAP), 2017.
[57] L. Zhao, X. Wang, H. Yao, M. Tian, and Z. Jian, Power line extraction from aerial images using object-based markov random field with anisotropic weighted penalty, IEEE Access, vol. 7, 2019. [ Links ]
[58] A. Zormpas et al., Power transmission lines inspection using properly equipped unmanned aerial vehicle (UAV), in Proc. IEEE Int. Conf. Imag. Syst. Technol (IST), 2018.
[59] L. Wang, Z. Chen, D. Hua, and Z. Zheng, Semantic segmentation of transmission lines and their accessories based on UAV-taken images, IEEE Access, vol. 7, 2019. [ Links ]
[60] Y. Zhang, X. Huang, J. Jia, and X. Liu, A recognition technology of transmission lines conductor break and surface damage based on aerial image, IEEE Access, vol. 7, 2019. [ Links ]
[61] Q. Wang, H. Xiong, and B. Qiu, The attitude control of transmission line fault inspection UAV based on ADRC, in Proc. Intern. Conf. Ind. Inf. Comput. Technol., Intell. Technol. Ind. Inf. Integr. (ICIICII), 2017.
[62] A. Valcarce et al., Airborne base stations for emergency and temporary events, in Int. Conf. Pers. Satellite Services, 2013, pp. 1325.
[63] D. Liu et al. , Distributed relay selection for heterogeneous UAV communication networks using a many-to-many matching game without substitutability, in IEEE/CIC Int. Conf. Communi. China, ICCC, 2017, doi: 10.1109/ICCChina.2017.8330382.
[64] X. Xu, Y. Zeng, Y. L. Guan, and R. Zhang, Overcoming endurance issue: UAV enabled communications with proactive caching, IEEE J. Sel. Areas Commun., vol. 36, no. 6, pp. 12311244, 2018. [ Links ]
[65] N. Hossein Motlagh, T. Taleb, O. Arouk, N. H. Motlagh, T. Taleb, and O. Arouk, Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives, IEEE Internet Things J., vol. 3, no. 6, pp. 899922, 2016, doi: 10.1109/JIOT.2016.2612119. [ Links ]
[66] R. Zhang, UAV meets wireless communication in 5G and beyond : Main research challenges and key enabling techniques, in Proc. IEEE Wireless Commun. Netw. Conf., 2018.
[67] Y. Ding, X. Wang, Y. Cong, and H. Li, Scalability analysis of algebraic graph-based multi-UAVs formation control, IEEE Access, vol. 7, 2019, doi: 10.1109/ACCESS.2019.2938991. [ Links ]
[68] Y. Huang, J. Tang, and S. Lao, Collision avoidance method for self-organizing unmanned aerial vehicle flights, IEEE Access, vol. 7, 2019, doi: 10.1109/ACCESS.2019.2925633. [ Links ]
[69] J. T. Mfiri, J. Treurnicht, and J. A. A. Engelbrecht, Automated landing of a tethered quad-rotor UAV with constant winching force, in 2016 Pattern Recognition Assoc. South Africa Robotic Mechatron. Int. Conf. (PRASA-RobMech), 2016.
[70] A. Panday and J. O. Pedro, An overview of aerial refueling control systems applied to UAVs, in 2013 Africon, 2013, doi: 10.1109/AFR-CON.2013.6757788.
[71] T. D. Nyasulu, S. Du, B. van Wyk, and C. Tu, Comparison study of low-cost obstacle sensing solutions for unmanned aerial vehicles in wildlife scenery, in Proc. 3rd IEEE Int. Conf. Comput. Commun., 2017, pp. 1072-1076.
[72] Z. Li, S. Mu, J. Li, W. Wang, and Y. Liu, Transmission line intelligent inspection central control and mass data processing system and application based on UAV, in 2016 4th Int. Conf. Appl. Robot. Power Ind. (CARPI), 2016.
[73] Q. Wu, L. Liu, and R. Zhang, Fundamental trade-offs in communication and trajectory design for UAV-enabled wireless network, IEEE Wireless Commun., pp. 3644, Feb. 2019.
[74] M. Mozaffari, A. T. Z. Kasgari, W. Saad, M. Bennis, and M. Debbah, Beyond 5G with UAVs: Foundations of a 3D wireless cellular network, IEEE Trans. Wireless Commun., vol. 18, no. 1, pp. 357352, 2019, doi: 10.1109/TWC.2018.2879940. [ Links ]
[75] A. A. Nasir, H. D. Tuan, T. Q. Duong, and H. V. Poor, UAV-enabled communication using NOMA, IEEE Trans. Commun., vol. 67, no. 7, pp. 51265138, 2019, doi: 10.1109/TCOMM.2019.2906622. [ Links ]
[76] A. A. Khuwaja, G. Zheng, Y. Chen, and W. Feng, Optimum deployment of multiple UAVs for coverage area maximization in the presence of co-channel interference, IEEE Access, vol. 7, pp. 8520385212, 2019, doi: 10.1109/ACCESS.2019.2924720. [ Links ]
[77] S. Primatesta, A. Rizzo, and A. la Cour-Harbo, Ground risk map for unmanned aircraft in urban environments, J. Intell. Robot. Syst., 2019.

Sheila N. Mugala received the B.S. degree in Electrical Engineering from Makerere University, Kampala, Uganda. She received the M.S. degree in Electrical Engineering from Makerere University, Kampala, Uganda. She has taught at Makerere University since 2006. Her research interests include wireless communications with a focus on unmanned aerial vehicles, green communications, electronics with focus on low cost humanitarian products, instrumentation and control systems.

Dorothy K. Okello (S'94-M'16) received the B.S. degree in Engineering (Electrical) from Makerere University, Kampala, Uganda in 1992. She received the M.S. degree in Electrical Engineering from the University of Kansas, United States in 1995 and the PhD degree in Electrical Engineering from McGill University, Canada in 2004. She is Dean of the School of Engineering at Makerere University. She is also the Principal Investigator of netLabs!UG, a telecommunications and networking technologies research center based at Makerere University. She is a member of the Uganda Institution of Professional Engineers (UIPE) where she served as President from 2016 to 2018. Dr. Okello served on the 20162019 IEEE Ad Hoc Committee for Africa (AHCA). Her research interests are in rural broadband connectivity, with a focus on wireless communications and networking and societal technology.

Jonathan Serugunda received the B.Sc. degree in Electrical Engineering from Makerere University in 2005. He received the M.Sc. degree in Communication Engineering from the University of Manchester, United Kingdom in 2008 and the Ph.D. degree in Electrical & Electronic Engineering from the University of Bristol, United Kingdom in 2015. He is a lecturer at Makerere University in the Department of Electrical and Computer Engineering. He is a member of netLabs!UG which is a wireless research center based at Makerere University. His research interests include radio wave propagation and antenna design, design and analysis of wireless networks, physical layer security and unmanned aerial vehicles (UAVs) assisted communication systems.

