










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkSAIEE Africa Research Journal
On-line version ISSN 1991-1696
Print version ISSN 0038-2221
SAIEE ARJ vol.108 n.1 Observatory, Johannesburg Mar. 2017
The modified soft input parity check transformation algorithm for Reed Solomon codes
Y. GengaI; D.J.J. VersfeldII
ISchool of Electrical and Information Engineering,University of the Witwatersrand, Private Bag 3, Wits 2050, Johannesburg, South Africa. E-mail: yuval.genga@students.wits.ac.za
IISchool of Electrical and Information Engineering,University of the Witwatersrand, Private Bag 3, Wits 2050, Johannesburg, South Africa. E-mail: jaco.versfeld@wits.ac.za
ABSTRACT
In this paper, we propose a modification to the recently developed Parity check Transformation Algorithm (PTA) used in the decoding of Reed Solomon codes. This extension of the PTA is referred to as the Modified Parity check Transformation Algorithm (MPTA). The MPTA is developed with the aim of reducing the number of iterations run by the algorithm during the decoding process, and also to improve on the SER performance of the algorithm. Three version of the MPTA are developed in this paper to achieve this goal.
Key words: Reed Solomon codes, Soft decision decoding, Iterative decoding.
1. INTRODUCTION
Reed-Solomon (RS ) codes [1] are a class of linear block codes that are widely used for applications that range from telecommunications to storage devices. These codes are largely popular because they meet the Singleton bound. What this means is that a hard decision decoder (HDD) based on minimum distance decoding can correct up to [n - k] /2 symbols for a given (n, k) RS code. Hard decision decoders for RS codes include the Berlekamp-Massey (B-M) algorithm [2] [3], the Euclidean algorithm [4], and the Berlekamp-Welch algorithm [5]. HDD algorithms for RS codes have been shown to be efficient, however, they are significantly outperformed by soft decision decoding techniques.
Koetter and Vardy (KV) [6] presented a symbol level decoding algorithm that utilizes the soft reliability information from the channel to make a multiplicity matrix that is fed into the Guruswami Sudan (GS) [7] algorithm. The KV algorithm outperforms HDD algorithms significantly especially for low rate codes. However, complexity can become prohibitively large when trying to achieve large coding gains with the KV algorithm [8].
The Parity check Transformation Algorithm (PTA) is a symbol wise soft decision decoding algorithm that was recently proposed in [9]. The algorithm transforms the parity check matrix, H , of an RS code after every iteration depending on the reliability of the symbols. The reliability of the symbols are attained from soft information received atthe channel output. In the same paper, the PTA algorithm was shown to outperform the widely used Koetter and Vardy (KV) algorithm and the Berlekamp-Massey (BM) algorithm for simulations run in the AWGN channel with the symbols being mapped onto a 16QAM modulation scheme. The performance was measured in terms of the symbol error rate (SER). The major drawback of the PTA is the high number of iterations needed to find the decoded codeword, especially for low SNR cases. In this paper, modifications to the PTA are introduced with the aim of reducing the number of iterations required to decode. These modifications are used to develop an extension of the PTA, which is referred to as the Modified PTA (MPTA)
The rest of the paper is structured as follows. A basic description of how the PTA decoding algorithm works is given in Section 2. The analysis and modifications to the PTA is explained Section 3. A performance comparison between the PTA and the MPTA algorithms is done in Section 4. Finally, a conclusion is given in Section 5.
2. THE PARITY CHECK TRANSFORMATION ALGORITHM
We now summarize the PTA algorithm [9] to establish notation. Consider an (n, k) RS code with a parity check matrix H in the field GF(2p). Let c be a codeword of length n. The symbols of the codeword c are mapped onto signals based on a selected modulation scheme and then transmitted through an AWGN channel. At the output of the channel a received vector r is obtained. Based on the vector r a reliability matrix R can be constructed. The matrix R is then fed into the PTA decoder.
The steps involved in one iteration of the PTA algorithm are as follows
1. Getting the symbol reliability: Find the highest values in each column of the R matrix. From these values, let the k highest values represent the most reliable symbols. The indices of these symbols are denoted by K. The remaining n - k values represent the least reliable symbols and their indices are denoted by U.
2. The H matrix transformation step: Transform the H matrix into matrix Htby performing row operations similar to Gaussian such that Htis in a rearranged systematic form based on the indices U and K. The transformation is done in such a way that the indices of U match the partitioned identity matrix and the K indices match the parity partition as shown in [9]. A computationally efficient way of doing this is shown in [10].
3. Performing the syndrome checks: For 1 < i < (n - k), the ithrow of the matrix Htcan be denoted as
.A syndrome check is now performed using all the n -k rows of the matrix H by performing hard decision detection on the R matrix to obtain a vector r, and getting the dot product
. Due to the rearranged systematic structure of Hit, only one symbol with the index in U participates in the syndrome check. All the k symbols in K participate in the dot product.
4. The correction step: If the dot product is not zero, we decrease the symbol indexed in U by the value of a correction factor, δ, and decrease the symbols indexed in K by δ/2. If the syndrome check is satisfied we add the δ to the symbol indexed in U and δ/2 to the symbols indexed in K.
5. The update step: These corrected reliabilities are then used to update the R matrix based on the U and K indices. The updated R matrix is then used in the next iteration.
6. The stopping criterion: steps 1 to 5 are repeated until all the (n - k) syndrome checks are satisfied, or until a negative value appears in the matrix R.

From [9] it was shown that a smaller correction factor (δ) improves the performance of the algorithm. This, however, comes at the cost of increased number of iterations as the algorithm has to perform more corrections to the received codeword.
3. MODIFICATIONS TO THE PTA ALGORITHM
We now analyze the performance of the PTA and the effect of the modifications to the algorithm. Simulations are based on a (15,7) Reed-Solomon code using BPSK modulation in an AWGN channel. The value of δ used is 0.001.
3.1 Performance of the PTA based on the number of iterations
To better understand how the PTA algorithm works, the early stopping condition used in [9] is not considered. The only stopping criterion for the algorithm is when all syndrome checks are satisfied. This version of the PTA defined by the syndrome check as the only stopping condition is denoted as PTAY.
Table. 1 shows the results for simulations run for the PTAY with 1000 codewords at an SNR of 0 dB. The number of codewords with error and the number of iterations required to satisfy the checks are recorded.
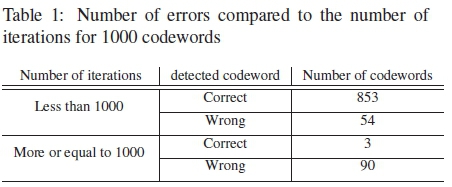
Fig. 1 shows simulations for the Hamming distance between the actual codeword and the decoded codeword at the output of each iteration of the PTAy. Results in Fig. 1 are representative for the 4 types of codewords decoded using the PTAY in Table 1. The 4 types of codewords represented include: the codewords correctly decoded within 1000 iterations, the codewords decoded correctly with more than 1000 iterations, the codewords decoded incorrectly within 1000 iterations and the codewords decoded incorrectly for over 1000 iterations.
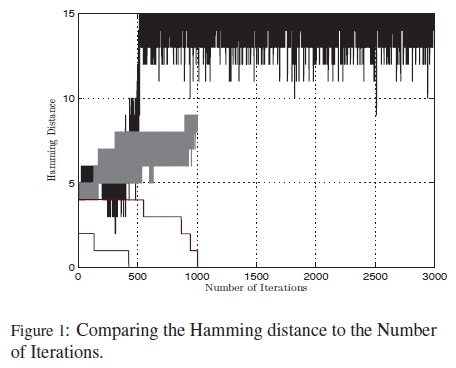
From Table 1 and Fig. 1 it can be seen that the PTAY algorithm outputs a codeword, regardless if it is correct or incorrect, when it satisfies the syndrome checks. What this means is that more iterations for the PTAY algorithm don't necessarily mean an improved performance with the algorithm. This can be seen especially when the algorithm runs for more than 1000 iterations. From Table 1 it can be seen that most of the syndrome checks for the correct codewords are also satisfied whenever the PTAY runs less than 1000 iterations. Most incorrect codewords are received from the PTAY whenever the algorithm runs for more than 1000 iterations.
From Table 1 only 3 codewords that run for 1000 or more iterations with the PTAY are decoded correctly. This indicates the presence of a threshold in the PTAY which occurs when the algorithm runs for more than 1000 iterations. Fig. 2 investigates the effect of different thresholds on the PTAY by setting different maximum number of iterations (Imax) the algorithm can run.
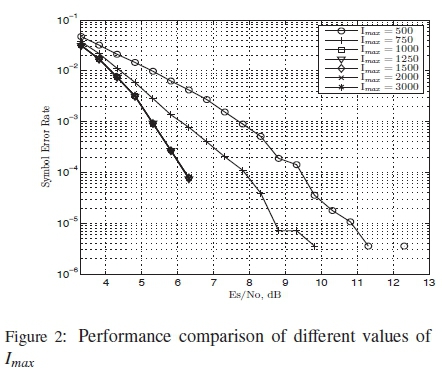
From Fig. 2 it can be seen that the threshold of the PTAY is at Imax = 1000 and that it serves as a point of saturation for the algorithm, as the performance appears to remain the same beyond this point. Thus, a set maximum value of 1000 iterations for the PTAY should be used to prevent redundancy.
3.2 Performance of the PTA based on the number of negative values in R
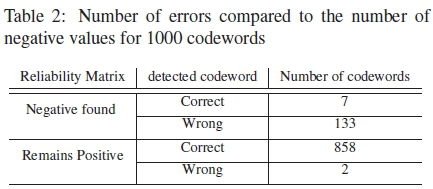
A possible reason for the increased errors with more iterations could be the appearance of negative values formed in the reliability matrix, originating from the corrections done during each iteration. Simulations to see how the number of negative values in the reliability matrix corresponded to the actual codeword matching the received codeword at the output of the PTAY. The test was run for 1000 codewords. The results of these simulations were recorded in Table. 2. From Table. 2, it can be seen that for most cases, the presence of a negative value in the reliability matrix directly affect the number of errors of the received codeword at the output of PTAY. This result validates the early stopping condition of the PTA algorithm used in [9]. To prevent errors caused by the negative values, absolute values of the corrected reliabilites are used after each iteration of the PTAY. This modification of the PTAY with absolute values is referred to as the absolute PTAY and denoted as aPTAY.
3.3 Performance of the PTA based on the Stagnant check.
If the absolute values are to be used, the early stopping condition defined in [9] is not applicable as the reliability matrix does not run into a negative value. To prevent the aPTAY from running upto Imaxiterations in the event it is unable to find the correct codeword, a new early stopping condition is required. A modification of the stagnant check [11], is added to the algorithm to perform this function. The stagnant check acts as a predictive algorithm, by trying to determine if the algorithm will have a decoding failure or a decoding success.
The stagnant check algorithm works as follows
1. At a given iteration
, the weight of the unsatisfied syndrome checks (w(s)) is noted.
2. The value of w(s) is noted for each iteration after Ia until a specified iteration Istagis reached.
3. At iteration Istag, a stagnant check is done.
• If w(s) is the same from
to Istagthen the algorithm is perceived to be stagnant (unable to find the correct codeword), and the decoding process is stopped.
• If w(s) has changed from
to Istagthen the aPTAY runs until all the syndrome checks are satisfied, or until Imaxis reached.
The main aim of the stagnant check is to help reduce the number of iterations required by the aPTAY. To get an optimum performance of the aPTAY with the stagnant check, simulations are done for different values of Istag and run for Imax= 1000 . Simulations are run for Ia= 1 and the stagnant check was done at Istag= 100, Istag= 200, Istag = 300, Istag = 400, Istag = 500, Istag = 600, Istag = 700.
The average number of iterations run by each was noted. The results for these simulations can be seen in Fig. 3.
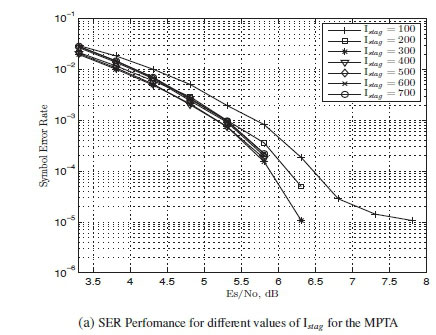
From Fig. 3 it can be seen that the aPTAY with the value of Istag = 400 gives the best performance when compared to the rest. The aPTAY with the stagnant check is referred to as the Modified Parity check Transformation Algorithm (MPTA).
3.4 Performance of the PTA based on the value of the correction factor, δ
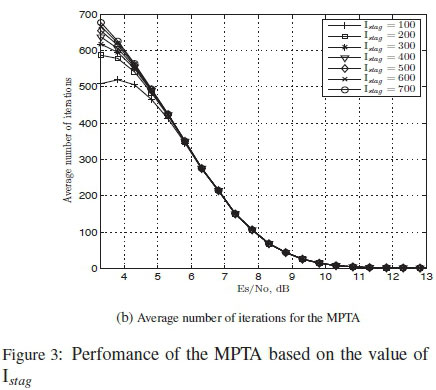
From Fig. 3(b), it can be seen that even with the stagnant check the algorithm still runs for many iterations in low SNR regions. The main reason for this is the use of a small value of δ. The smaller the value of δ the better the perfomance, but this is at the cost of an increased number of iterations as shown in [9]. This is because there is not a large difference in the corrections made by δ in each iteration for the wrong symbols as it attempts to satisfy the syndrome checks. Since the difference in the corrections made by a δ of 0.001 are quite small several iterations would be required to satisfy the checks. Simulations for different values of δ with the aPTAY are done to test for the performance and the average number of iteration required by the algorithm. No stagnant check is used because an accurate representation of the average number of iterations run by the algorithm for each SNR is required. The results for these simulations can be seen in Fig. 4.
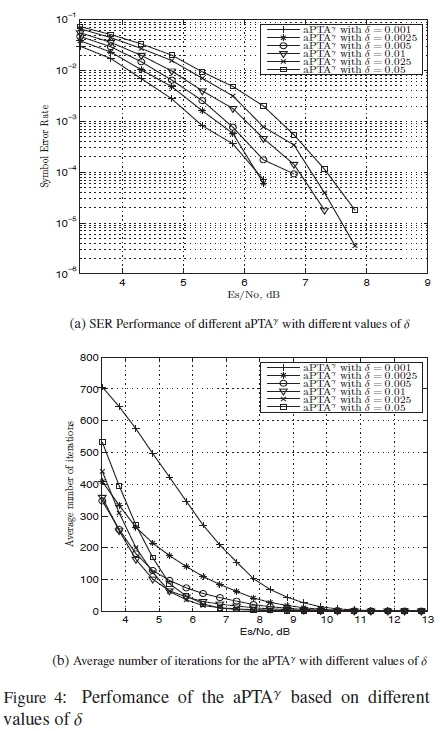
Fig. 4 validates the results shown in [9] with a BSPK modulation scheme for the PTA. It can also be seen that the number of iterations run by the aPTAY between δ = 0.005 and δ = 0.001, increases as the value of δ reduces for lower SNR regions. However, the opposite seems to happen between δ = 0.01 and δ = 0.05. This is due to these values of δ making a large difference in the corrections made to the soft information. This causes the algorithm to change the reliability of the symbols faster, thus passing the correct symbols as it satisfies the checks. It is evident from Fig. 4 that the value of the correction factor should be δ< 0.01 for better SER results to be obtained with the algorithm. To reduce the number of iterations run by the MPTA, a discreet variable δ approach is added to the algorithm. For this implementation, two scenarios are considered. A case of increasing values of δ, and a case of reducing values of δ. In both cases, the value of δ changes with respect to the number of iterations.
For this analysis, three values of δ are used. The values of δ chosen are δ = 0.005, δ = 0.0025 and δ = 0.001. The reason these values of δ have been selected is because the performance difference between δ = 0.001 and δ = 0.005, from Fig. 4, is about 0.5 dB.
To help with the implementation of this form of discreet variable δs with the algorithm, a similar simulation to the one done in Fig. 1 is done for the PTAY with δ = 0.005 and δ = 0.0025 for 1000 codewords. This is done to help with the assignment of the number of iterations that each δ receives. The results for these simulations can be seen in Fig. 5, Table 3 and Table 4.
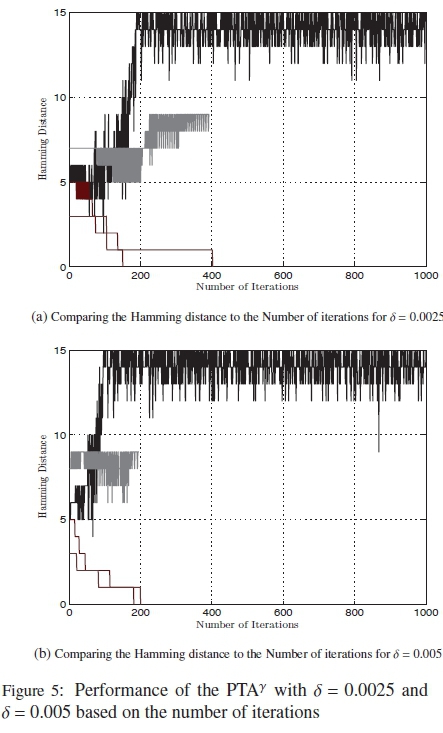
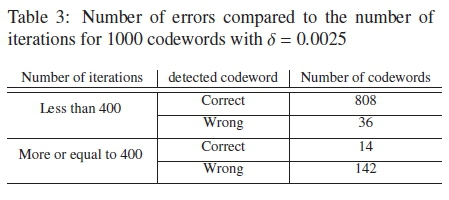
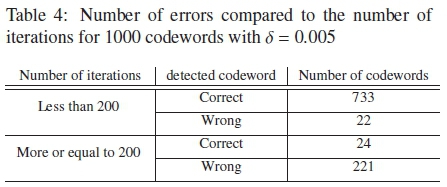
The simulations are let to run for as many iterations until the syndrome checks are satisfied. For Fig. 5, to better see the results, only the first 1000 iterations are shown. Once again, results for only 4 codewords that are representative of most of the other codewords decoded with the PTAY are used. The 4 types of codewords are highlighhted in the results recorded in Table 3 and Table 4.
From Fig. 5 and Table 4 it can be seen that for δ = 0.005 most of the correct received codewords are found within 200 iterations. Beyond this, the algorithm begins to saturate and is unable to find the correct codeword to satisfy the syndrome checks. For δ = 0.0025 the algorithm appears to saturate after about 400 iterations as seen in Fig. 5 and Table 3. Therefore, of the 1000 maximum iterations for the MPTA, the number of iterations each δ runs is assigned with respect to the SER perfomance shown in Fig. 4(a) and the performance based on the number of iterations required to satisfy the checks shown in Fig. 1 and Fig. 5. For the case of the increasing δ, the number of iterations is split as follows
• δ = 0.001 runs for the first 625 iterations
• δ = 0.0025 runs the next 300 iterations
• δ = 0.005 runs the last 75 iterations
For the case of the decreasing δ, the number of iterations is split as follows
• δ = 0.005 runs for the first 75 iterations
• δ = 0.0025 runs the next 300 iterations
• δ = 0.001 runs the last 625 iterations
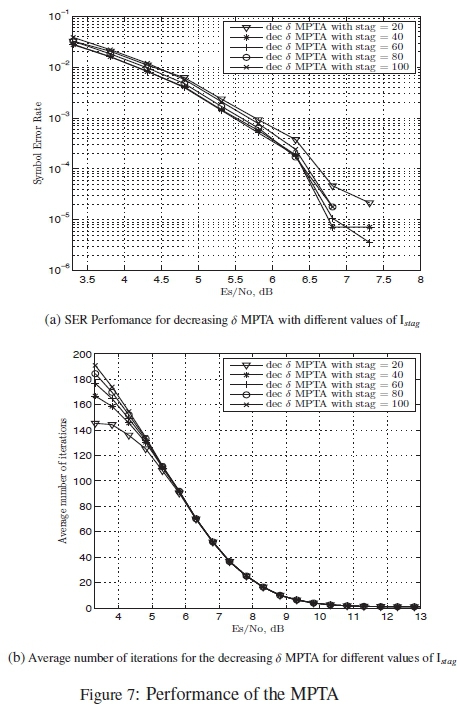
Simulations for the discreet variable δ version of the MPTA are done to test for the optimum performance with different values ofIstag. These simulations are for SER performance and the average number of iterations required by the algorithm. The values of Istag used in the simulations for the decreasing δ are smaller than those used for increasing δ. The reason for this that for the decreasing δ case, the first value of δ used is 0.005. An earlier stagnant check for δ = 0.005 is required as the corrections it makes to the codeword during each iteration are larger than those of δ = 0.001. As a result it runs into a stagnant state much earlier as shown in Fig. 5. The results of these simulations for the both cases of increasing and decreasing δ can be seen in Fig. 6 and Fig. 7 respectively.
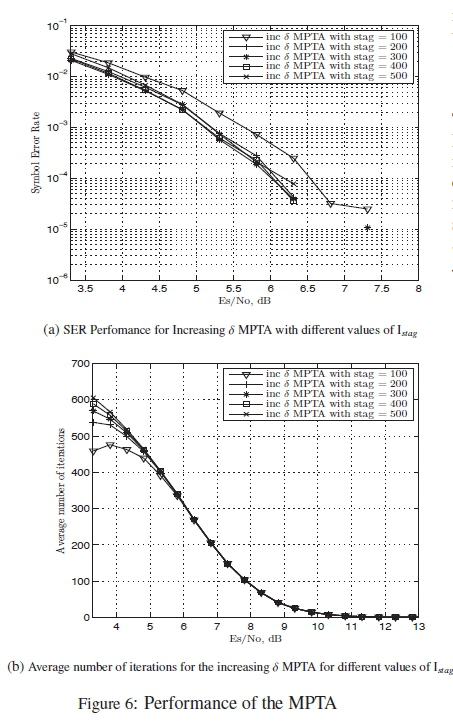
From Fig. 6 it can be seen that the best performance, in terms of SER, is obtained when Istag = 400. It is naturally outperformed by Istag = 100, Istag = 200 and Istag = 300 in terms of the number of iterations required for the lower SNR values. Based on the SER performance, the value of Istag = 400 was selected for the increasing δ version of the MPTA in the comparative study.
A similar observation can be done in Fig. 7 with Istag = 80, as it the gives best performance in terms of SER. In terms of the number of iterations, it is outperformed by Istag = 20, Istag = 40 and Istag = 60 for low SNR values. Based on the SER performance, the value of Istag = 80 was selected for the decreasing δ version of the MPTA in the comparative study.
4. PERFORMANCE ANALYSIS
Fig. 8 shows simulations for the performance comparison of PTA to that of the MPTA with a single δ of 0.001 and Istag = 400, an increasing δ with Istag = 400 and a decreasing δ with Istag = 80.
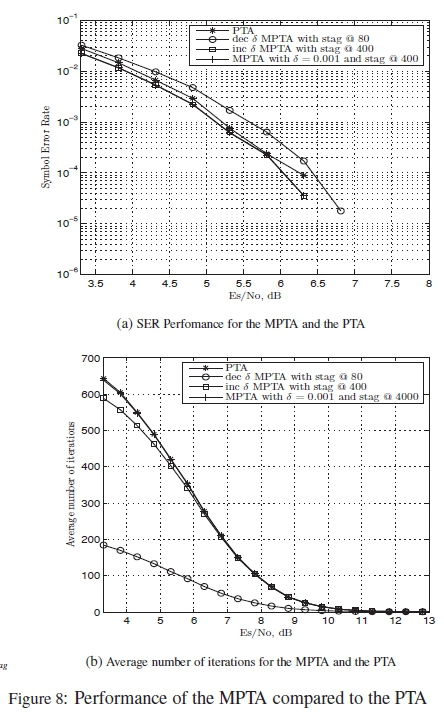
From Fig. 8 it can be seen that the single δ MPTA and the increasing δ MPTA have an almost identical performance and they both outperform the PTA in terms of SER. In terms of the average number of iterations for low SNR areas, the decreasing δ MPTA significantly outperforms all versions of the PTA. However, this is at a cost of about 0.5 dB. This SER performance difference justifies the use of the decreasing δ MPTA when a trade-off between SER performance and number of iterations is required. The increasing δ MPTA runs for less iterations than the PTA and gives a better performance. The single δ MPTA gives a better perfomance than the PTA but gives no difference in the average number of iterations.
5. CONCLUSION
In this paper, we are able to develop three different versions of the MPTA, each with its own trade-offs. The single δ MPTA increases the performance of the algorithm but at no reduction in the number of iterations. The increasing δ MPTA outperforms the PTA in terms of both the SER and the number of iterations required to decode. It also gives an almost identical performance to that of the single δ MPTA while running for less iterations in the low SNR regions. Finally, the decreasing δ MPTA significantly reduces the average number of iterations run by the algorithm by well over 400 iterations. This reduction in the number of iterations comes at the cost of a loss of less than 0.5 dB when compared to the PTA.
ACKNOWLEDGEMENT
The financial assistance of the National Research Foundation (NRF) of South Africa towards this research is hereby acknowledged. Opinions expressed and conclusions arrived at, are those of the authors and are not necessarily to be attributed to the NRF. The financial support of the Centre for Telecommunication Access and Services (CeTAS), the University of the Witwatersrand, Johannesburg, South Africa is also acknowledged.
REFERENCES
[1] I. S. Reed and G. Solomon, "Polynomial Codes over Certain Finite Fields," J. Soc.Ind. Appl. Maths., 1960.
[2] J. Massey, "Shift-register synthesis and BCH decoding," Information Theory, IEEE Transactions, 1969.
[3] E. R. Berlekamp, "Algebraic Coding Theory," New York: McGraw-Hill, 1968. [ Links ]
[4] S. H. Y. Sugiyama, M. Kasahara and T. Namekawa, "A method for solving key equation for decoding goppa codes," Information and Control, 1975.
[5] L. R. Welch and E. R. Berlekamp, "Error correction for algebraic block codes," Patent US 4 633 470, 1986.
[6] R. Koetter and A. Vardy, "Algebraic Soft-Decision Decoding of Reed-Solomon Codes," Information Theory, IEEE Transactions on, 2003.
[7] V. Guruswami and M. Sudan, "Improved decoding of Reed-Solomon and Algebraic-Geometry Codes," Information Theory, IEEE Transactions on, 1999.
[8] J. Jiang and K. Narayanan, "Iterative Soft-Input Soft-Output Decoding of Reed Solomon Codes by Adapting the Parity-Check Matrix," Information Theory, IEEE Transactions on, 2006.
[9] O. Ogundile, Y. Genga, and D. Versfeld, "Symbol level iterative soft decision decoder for Reed-Solomon codes based on parity-check equations," Electronics Letters, vol. 51, no. 17, pp. 1332-1333, Aug. 2015. [ Links ]
[10] D. Versfeld, J. Ridley, H. Ferreira, and A. Helberg, "On Systematic Generator Matrices Reed-Solomon codes," Information Theory, IEEE Transactions on, vol. 56, no. 6, pp. 2549-2550, June 2010. [ Links ]
[11] B. Shin, S. H. Kim, J. S. No, and D. J. Shin, "New stopping criteria for decoding LDPC codes in H-ARQ systems," in Information Theory and Its Applications, 2008. ISITA 2008. International Symposium on, Dec 2008, pp. 1-5.

